TB6600ステッピングモーターコントローラー:ピンアウト、arduinoインターフェース、およびそれがどのように機能するか
カタログ
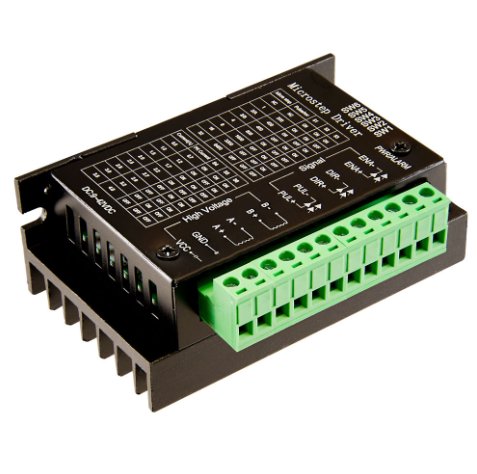
TB6600ステッパーモータードライバーモジュールの概要
TB6600 Stepper Motor Driverモジュールは、2相ステッパーモーターを制御するための回復力と適応性によって区別されるデバイスです。シームレスにシームレスに接続し、ほとんどがArduinoの幅広いマイクロコントローラーで、正確な5Vデジタルパルス出力の作成を促進します。これらの出力は、モーター制御の微妙なバランスを維持するための動的です。9-42V DCの電圧範囲内で動作し、4アンペアのピーク電流をサポートするため、さまざまなモーター駆動型プロジェクトでは多用途の選択肢です。この適応性により、モーターのポジショニングと速度を効率的に管理できます。これは、コーディングの複雑さを最小限に抑えることを目的としたアプリケーションで非常に有益です。モジュールの高周波光カプラーの分離は、干渉リスクを減らし、安定した動作を確保することにより、信頼性を大幅に向上させます。
多数のマイクロコントローラーとの調和により、TB6600ドライバーは、複雑なモーター制御を必要とするプロジェクトにふさわしい選択肢になります。Arduinoのようなプラットフォームとスムーズに統合し、多様な期待を満たす能力を反映しています。たとえば、CNCマシンまたは3Dプリンターでこのドライバーを使用すると、さまざまな分野での有用性を示す正確で制御された動きが可能になります。
このモジュールは、2相および4相の両方のステッピングモーターとハイブリッド構成の両方をサポートしているため、際立っています。バイポーラHブリッジの設計は、電圧と電流を効率的に管理するために不可欠であり、ドライバーがアプリケーション全体でピークパフォーマンスを提供することを保証します。自動化された生産ラインやロボット工学など、精度と信頼性が優先される環境では、これらの機能は高く評価されています。
特徴
|
特徴 |
説明 |
|
ドライバータイプ |
双極H-ブリッジDCドライバー |
|
出力現在のオプション |
8種類(0.5a〜3.5a)、最大4アンペアまで選択可能 |
|
区画モード |
6つのモードで選択可能な32まで分割します |
|
マイクロステップオプション |
8種類(1、2/a、2/b、4、8、16、32) |
|
入力信号分離 |
高速光電気分離 |
|
インタフェース |
完全な標準シングルパルスインターフェイス |
|
オフラインホールド機能 |
はい |
|
環境適合性 |
過酷な環境のための半閉鎖体 |
|
パワーロック機能 |
半自動、省エネ |
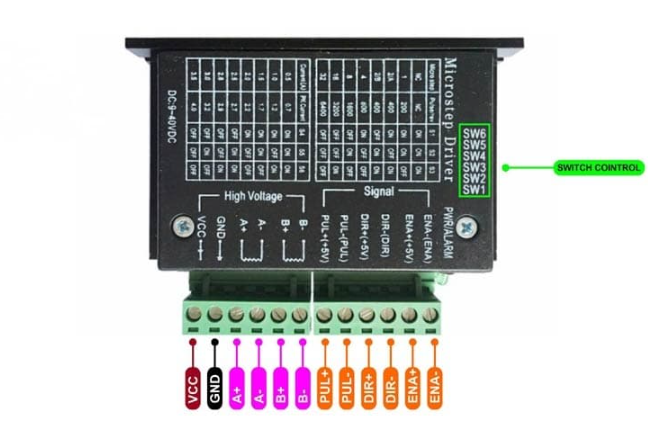
ピン構成
技術仕様
|
仕様 |
詳細 |
|
動作電圧 |
9-40V DC |
|
出力電流 |
0.7A-4.0A(ディップスイッチを介して8つのステップで選択) |
|
入力パルス周波数 |
最大20kHz |
|
入力信号レベル |
5V信号レベル |
|
革命ごとのパルス |
200-6400 |
|
ロジック信号電流 |
8A-15A |
|
モーターの互換性 |
2相および4相のステッパーモーターに適しています |
|
保護機能 |
過電流、過熱保護 |
|
入力分離 |
光学的に孤立しています |
|
絶縁抵抗 |
500 Megohms |
|
サポートモード |
パル/ファーモード |
|
料金 |
低コスト |
TB6600のHブリッジ回路構成
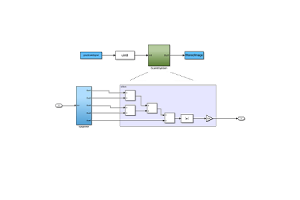
TB6600ステッパーモータードライバーモジュールは、効率的な動作のために双極Hブリッジ構成を利用して、2相と4フェーズの両方のステッパーモーターを制御するように設計された深刻なコンポーネントです。この構成は、MOSFETトランジスタを採用して、現在の取り扱いと熱安定性の観点から高性能を確保しています。モジュールは、各パルスでモーターステッピングをトリガーするステップピンと、適用された電圧に基づいてモーターの回転方向を決定する方向ピンの2つのプライマリコントロールピンと相互作用することで動作します。一緒に、これらの入力により、モーターのステッピングシーケンスと回転方向を正確に制御できます。
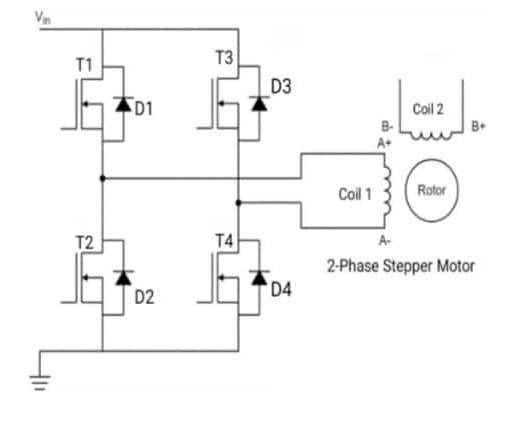
回路図は、Hブリッジ構造に配置された4つのキートランジスタ、T1、T2、T3、およびT4を強調しています。これらのMOSFETは、モジュールの動作のバックボーンであり、ステッパーモーターを駆動するのに必要な電流の双方向の流れを可能にします。さらに、図にはフライバックダイオード(D1、D2、D3、およびD4)が含まれており、モーターの誘導負荷によって引き起こされる電圧スパイクから回路を保護するための鍵です。これらのダイオードは、動作中の過電流と機密成分への損傷を防ぎます。A+、A-、B+、およびB-端子を使用してモーターを接続し、モーターシャフトの正確で制御された動きを確保します。
Hブリッジはモーターの回転をどのように可能にしますか?
TB6600ドライバーは、HブリッジのMOSFETトランジスタの調整されたアクションを通じて動作します。例えば:
•トランジスタT1とT4が活性化されているときに時計回りの回転が発生し、A+からA-に電流の流れを誘導します。
•T2とT3が関与しているときに反時計回りの回転が発生し、A-からA+への電流の流れが反転します。
トランジスタのこの交互の活性化により、滑らかな双方向の動きが保証されます。最適なトルクと効率的な動作を実現するには、正確なタイミングと電圧の調節が不可欠です。
汎用性のある制御のための動作モード
TB6600は、アプリケーションの要件に応じて、トルク、精度、およびステップサイズのバランスをとるように設計された4つの異なる動作モードをサポートしています。
• 波モード:このモードでは、一度に1つのコイルのみがエネルギーを与えます。単一のコイルをアクティブにすると、モーターが一方向に90度回転し、電流を反転させると反対方向に回転します。コイルを交互に行うことにより、モーターは連続動作を実現します。このモードはシンプルですが、他のモードと比較してトルクが少なくなります。
• フルステップモード:このモードでは、両方のコイルが同時にエネルギー化され、より強力な磁場が生成されます。これにより、トルクが増加し、より多くのパワーと安定性を必要とするアプリケーションに最適です。
• ハーフステップモード:ウェーブモードとフルステップモードの組み合わせで、このモードは、単一のコイルと両方のコイルをエネルギー化することを交互にします。ステップサイズを効果的に45度に削減し、精度とトルクのバランスを提供します。ただし、トルクは、特定のステップ中に1つまたは両方のコイルがエネルギー化されるかどうかによって異なる場合があります。
• マイクロステップモード :すべてのモードの中で最も正確なマイクロステップモードは、モーターフェーズを介して電流を慎重に変調することにより、ステップサイズをさらに削減します。これは、高度な回路を使用して達成され、ステップ間でスムーズかつ段階的な遷移を作成します。このモードは、CNCマシンやロボット工学など、高精度と一貫したトルクを必要とするアプリケーションに最適です。
TB6600をArduino UNOと統合します
Stepper Motorsの効率的な制御には、信頼できるハードウェアと慎重にプログラムされたソフトウェアの組み合わせが必要です。TB6600ステッパーモータードライバーは、2相ステッパーモーターを操作するための優れたツールとして際立っています。波、フルステップ、ハーフステップ、マイクロステップなど、複数の運用モードをサポートします。低電圧、過電流、過熱に対するセーフガードを含む、その組み込みの保護機能は、精度と耐久性を必要とするプロジェクトに確固たる選択となります。
Arduino UNOでTB6600をセットアップするには、次のコンポーネントを収集します。
•Arduino uno R3
•TB6600ステッパーモータードライバー(4Aバージョン)
•ステッピングモーター(1.65aの推奨評価を伴う)
•信頼できる電源(例:バッテリーまたは規制されたDC電源)
•ジャンパーワイヤ
•コンピューターにインストールされているArduino IDE
TB6600をArduinoと統合するには、これらの詳細な指示に従ってください
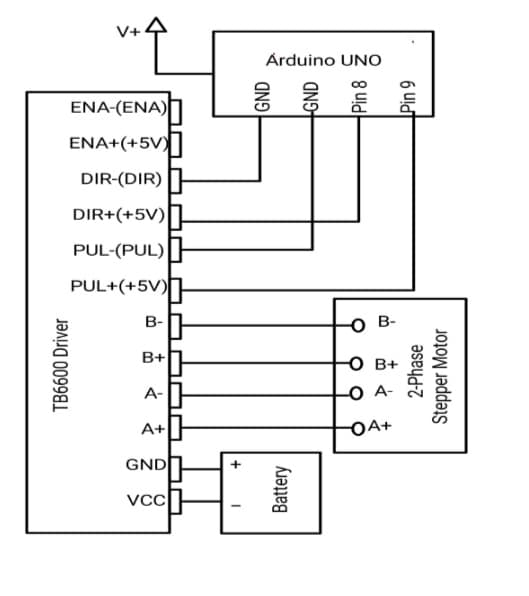
方向とパルス信号を接続します
•TB6600のDIR+およびPUL+端子をそれぞれArduinoピン8と9にリンクします。これらのピンは、方向とパルス信号を送信します。
•arduinoの地面(GND)ピンにdireおよびpul-端子を取り付けます。
•モーターをTB6600に接続します。ステッピングモーターワイヤをTB6600端子に取り付けます。
•モーターの1つのコイルのA+およびA-。
•他のコイルの場合はB+およびB-。
•TB6600ドライバーに電力を供給する:TB6600のVCCおよびGNDピンを電源に接続します。ダメージを避けるために、電圧がモーターとドライバーの要件に一致することを確認してください。
マイクロステップ解像度の調整
TB6600を使用すると、SW1およびSW2スイッチを使用して、ステッパーモーターの動きの精度を微調整できます。これらのスイッチを次のように調整します。
•¼ステップ解像度:SW1をオンにし、SW2をオフにします。
•⅛ステップ解像度:SW1をオフにし、SW2をオンにします。
•1/32ステップ解像度:SW1とSW2の両方をオフにします。
•フルステップモード:SW1とSW2の両方をオンにします。
真実のテーブル
|
SW2 |
マイクロステップ解像度 |
|
オフ |
1/32ステップ |
|
の上 |
1/8ステップ |
|
オフ |
1/4ステップ |
|
の上 |
完全なステップ |
スイッチ調整を使用すると、プロジェクトのニーズに基づいて、精度と速度のバランスを最適化できます。
モーターが安全な電流制限内で動作するようにするために、TB6600は電流フローを調整するための追加のスイッチ(SW4およびSW6)を備えています。これらの設定は次のように役立ちます。
•過負荷損傷の防止。
•一貫したモーター性能の維持。
•両方のコンポーネントを保護するために、モーター電流がドライバーの最大4Aを下回っていることを常に確認してください。
•モーターの方向を制御:モーターを反時計回りに回転させたい場合は、ArduinoコードのDIR+ PINの状態を変更します。
•テストとトラブルシューティング:セットアップを完了したら、基本的なステッパーモーターコントロールスケッチをアップロードして、配線とドライバーの機能を確認します。
•過熱を避ける:特に高電流アプリケーションで、TB6600ドライバーの適切な換気を確保します。
アプリケーション
TB6600モジュールは、細心の運動制御が使用される多数のセクターで積極的な役割を果たします。その適応性は、独自の機能を強調するさまざまな実装で輝いています。
アンテナポジショニング
通信の分野では、最適なアンテナアライメントを達成することは、高品質の信号受信と伝送に義務付けられています。TB6600は精密な動きを促進し、それによりコミュニケーションシステムの有効性を高めます。
ステッピングモーター管理
自動化とロボット州では、TB6600を通じて正確なステッピングモーターの取り扱いが実現され、動きの精度とシステムの信頼性を強化することができます。
CNC操作
コンピューター数値制御(CNC)マシンの場合、TB6600は複雑な切断および粉砕プロセスを強化し、高度な精度と再現性の精度を維持できるようにします。
3D印刷精度
添加剤の製造、特に3D印刷では、TB6600は詳細なモーター制御を提供し、複雑な形状とフォームを作成するために必要な印刷ヘッドの正確な位置をサポートします。
複雑なモーター制御
このモジュールは、複雑な自動化システム内の複雑なモーター制御タスクに役立ち、効率を高め、洗練された管理を可能にします。
速度、位置、および回転の制御
TB6600は、絶えず変化する環境でパフォーマンスを最適化するために主に使用される正確な速度と回転制御を必要とするシナリオで優れています。
イメージングデバイスと銀行システム
このモジュールは、滑らかで正確なモーターの動きを確保することにより、カメラとATMの信頼できる操作をサポートし、デバイスの動作寿命を延長します。
彫刻装置の精度
彫刻ツールと機械の場合、TB6600は、精度と詳細が支配的な業界の危険な要因である、細かく詳細な設計を実行するために必要な正確な制御を提供します。
関連情報
ALLELCO LIMITED
もっと見る
クイックお問い合わせ
お問い合わせを送ってください、すぐに返信します。
一般的な問題 [FAQ]
1. TB6600ドライバーにはどのような電源を使用すればよいですか?
TB6600ステッパーモータードライバーは、8V〜45Vの電源電圧で動作します。
2. TB6600でステッパーモーターの速度を制御するにはどうすればよいですか?
TB6600は、パルス幅変調(PWM)を使用してモーター速度を調整します。PWM周波数を変更することにより、速度を変更できます。
3. TB6600は高電流ステッパーモーターをサポートできますか?
はい、TB6600は最大4.5aを処理でき、この電流まで定格のステッパーモーターと互換性があります。
4. TB6600を使用してモーター方向を逆転させるにはどうすればよいですか?
モーターの方向を逆転させるには、コントロールピンの入力信号シーケンスを切り替えます(たとえば、in1-in2-in3-in4 for forward、in4-in3-in2-in1を逆に)。
5.ステッピングモーターを4つ以上のワイヤーでTB6600に接続できますか?
TB6600は、4線ステッパーモーター用に作られています。モーターに4つ以上のワイヤがある場合、別のドライバーが必要になります。
6。TB6600はNEMA23ステッパーモーターと互換性がありますか?
TB6600はNEMA17モーターとうまく機能しますが、現在の要件が高いため、NEMA23モーターには一般的に不適切です。

E18-D80NK調整可能なIRセンサーの完全なガイド
12/12/2024で公開されています
DS3231 RTCモジュール説明:ピン図、仕様、マイクロコントローラーインターフェース
12/12/2024で公開されています
ホットポスト
-

複雑な命令セットコンピューター:コンピューティングをどのように変更しましたか?
04/18/8000で公開されています 147753
-

USB-Cピンアウトと機能
04/18/2000で公開されています 111929
-
Xilinx Unified Simulation Primitivesの使用:FPGAの設計とシミュレーションの包括的なガイド
04/18/1600で公開されています 111349
-

電子機器における電源電圧: VCC、VDD、VEE、VSS、および GND の意味
04/18/0400で公開されています 83715
-

RJ45コネクタガイド:ピンアウト、配線、ケーブルタイプ、および使用
01/1/1970で公開されています 79505
-

現代の電気システムにおけるワイヤカラーコードの究極のガイド
電気システムの使用方法は、色だけではありません。各ワイヤーの色は特定の機能を示し、設置とメンテナンス中に電気コンポーネントを正しく識別して処理しやすくなります。これは、運用プロセスをスピードアップするだけでなく、間違いの可能性を減らし、ユーザーと技術者の両方を安全に保つのに役立ちます。この記事では、ワイヤーカラーコードの重要性、安全性と機能への影響、およびそれらを導くグローバル基準について説...01/1/1970で公開されています 66872
-

品質(Q)係数:方程式とアプリケーション
質の高い要因、または「Q」は、無線周波数(RF)を使用する電子システムでインダクタと共振器がどれだけうまく機能するかをチェックするときに重要です。「Q」は、回路がエネルギーの損失を最小限に抑え、システムが主要な周波数を中心に処理できる周波数の範囲にどの程度適切に影響するかを測定します。インダクタ、コンデンサ、および調整された回路を備えたシステムでは、より高い「Q」は、回路が特定の周波数に焦点...01/1/1970で公開されています 63009
-

パージバルブガイド:機能、症状、テスト、および最適なエンジン性能の交換
パージバルブは、大気に逃げる前に燃料蒸気を管理することで空気を清潔に保つのに役立つ車のシステムの重要な部分です。これは、汚染を減らすことで環境を支援するだけでなく、車の走行を改善し、燃料をより効率的に使用するようにします。この記事では、パージバルブの作業方法、タイプ、適切に機能しているかどうかを確認する方法など、パージバルブの詳細について説明します。 <h2 style=...01/1/1970で公開されています 62959
-

最大電力伝達定理でピーク性能を達成します
最大電力伝達定理は、バッテリーや発電機などのソースからのエネルギーが接続荷重にどのように流れるかを説明します。これは、負荷が最もパワーを受ける正確な条件を示しています。この記事では、定理の意味、DC回路とAC回路の両方でどのように機能するか、その背後にある証拠、その実生活のアプリケーション、およびその利点と短所について説明します。最後に、この原則がソーラーパネル、ラジオ、スピーカー、さらには...01/1/1970で公開されています 54080
-

A23バッテリー仕様と互換性
A23バッテリーは、高電圧の小さなシリンダー型のバッテリーです。23A、23AE、またはMN21とも呼ばれ、12ボルトで走行し、AAまたはAAAバッテリーよりもはるかに高くなっています。その特別なデザインにより、小さいながらも強力な電源が必要なガジェットに最適です。この記事では、A23バッテリーの機能、パフォーマンス、および使用について説明します。さまざまなブランドやその他...01/1/1970で公開されています 52099
ホットパーツ番号
-

TLV9154QDYYRQ1
Texas Instruments
IC OPAMP
ADV8005KBCZ-8C
Analog Devices Inc.
IC VIDEO SGNL PROC 425CSPBGA
C3225X7R2J683K200AA
TDK Corporation
CAP CER 0.068UF 630V X7R 1210
MAX8709BETI+T
Analog Devices Inc./Maxim Integrated
IC CCFL CNTRL 300KHZ 28TQFN
TL3414AIPWR
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8TSSOP
RD43S-T1-AT
Renesas
RD43S-T1-AT - ZENER DIODES200 MW
OPA1664AIPWR
Texas Instruments
IC AUDIO 4 CIRCUIT 14TSSOP
PRMA1A12
Coto Technology
RELAY REED SPST 500MA 12V
1N5820RLG
onsemi
DIODE SCHOTTKY 20V 3A AXIAL
NCV7680PWR2G
onsemi
IC LED DRVR LIN DIM 75MA 16SOIC
GBPC3510W
Taiwan Semiconductor Corporation
35A, 1000V, STANDARD BRIDGE RECT
GRM1556R1H2R4CZ01D
Murata Electronics
CAP CER 2.4PF 50V R2H 0402
SKY13751-11
Skyworks Solutions Inc.
MLB/MB/HB/UHB Diversity Receive
TCA355G
Infineon Technologies
TCA355G - PROXIMITY SWITCH
CC1812KKX7R9BB184
YAGEO
CAP CER 0.18UF 50V X7R 1812
ICS9179BF-03LF
Renesas Electronics America Inc
IC CLK BUFFER 1:10 133MHZ 28SSOP
QS3VH257S1G8
Renesas Electronics America Inc
IC BUS SWITCH 4 X 2:1 16SOIC
XC7S100-2FGGA676I
AMD
IC FPGA 400 I/O 676FPBGA -

TYN20-800T,127
WeEn Semiconductors
SCR 800V 20A TO220AB
MCP3913A1T-E/SS
Microchip Technology
IC ENERGY METER FRONT 6CH 28SSOP
SN74ABT245BDBR
Texas Instruments
IC TXRX NON-INVERT 5.5V 20SSOP
LTC3717EGN#TRPBF
Analog Devices Inc.
IC REG CTRLR DDR 1OUT 16SSOP
MAX5352ACUA+T
Analog Devices Inc./Maxim Integrated
IC DAC 12BIT V-OUT 8UMAX
PCA9617ATPZ
NXP USA Inc.
IC REDRIVER I2C 1CH 1MHZ 8HWSON
BYQ28E-200-E3/45
Vishay General Semiconductor - Diodes Division
DIODE ARRAY GP 200V 5A TO220AB
P6KE400A
Diotec Semiconductor
TVS DO-15 342V 600W UNI
MX25L3206EM2I-12G
Macronix
IC FLASH 32MBIT SPI 86MHZ 8SOP
MB95F012KPFT-G-SNE2
Infineon Technologies
MM MCU
LQW15AN5N6B80D
Murata Electronics
FIXED IND 5.6NH 1.77A 40MOHM SMD
AD8420ARMZ
Analog Devices Inc.
IC INST AMP 1 CIRCUIT 8MSOP
NP0900SAT3G
onsemi
THYRISTOR 75V 50A DO214AA
KC2520C38.4000C1YE00
KYOCERA AVX
XTAL OSC XO 38.4000MHZ CMOS SMD
CL21B224KBF4PNE
Samsung Electro-Mechanics
CAP CER 0.22UF 50V X7R 0805
NCS2300MUTAG
onsemi
IC DETECTION SWITCH 6UDFN
MTFC256GBAOANAM-WT
Micron Technology Inc.
IC FLASH 2TBIT MMC
V28A48C200BL
Vicor Corporation
DC DC CONVERTER 48V 200W -

MEA1210LC150T001
TDK Corporation
FILTER LC 15PF 240MHZ SMD
SN74AC00N
Texas Instruments
IC GATE NAND 4CH 2-INP 14DIP
04025A161JAT2A
KYOCERA AVX
CAP CER 160PF 50V NP0 0402
RT0805DRE0727RL
YAGEO
RES SMD 27 OHM 0.5% 1/8W 0805
ATF-34143-TR1
Broadcom Limited
FET RF 5.5V 2GHZ SOT-343
ADC08500CIYB
Texas Instruments
ADC, PROPRIETARY METHOD, 8-BIT,
CBS1004803
Cosel USA, Inc.
DC DC CONVERTER 3.3V 77W
1812GC221KAT1A
KYOCERA AVX
CAP CER 220PF 2KV X7R 1812
EP4CE40F23I7N
Intel
IC FPGA 328 I/O 484FBGA
08051C561K4Z2A
KYOCERA AVX
CAP CER 560PF 100V X7R 0805
HIP6302CB-T
Intersil
SWITCHING CONTROLLER
LQW15AN39NJ00D
Murata Electronics
FIXED IND 39NH 250MA 700MOHM SMD
NC7SZ10L6X
onsemi
IC GATE NAND 1CH 3-INP 6MICROPAK
ISL29003IROZ
Renesas Electronics America Inc
SENSOR OPT 550NM AMBIENT 6ODFN
UUX1H470MNL1GS
Nichicon
CAP ALUM 47UF 20% 50V SMD
NC7SV00P5X
onsemi
IC GATE NAND 1CH 2-INP SC70-5
LTC1705EGN#TRPBF
Analog Devices Inc.
IC PWR SUPPLY CONTROLLER 28SSOP
GRM1555C1E3R0CA01D
Murata Electronics
CAP CER 3PF 25V C0G/NP0 0402