FPGA とマイクロコントローラー: 知っておくべき主な違い
PCB 設計を扱うときは、システムのニーズに基づいて FPGA とマイクロコントローラーのどちらかを選択することがよくあります。この記事では、それぞれが何であるか、どのように機能するか、およびそれらに含まれる主要なコンポーネントについて説明します。また、システム構造とプログラミングのアプローチがどのように異なるのかもわかります。これらの基本を理解することで、どちらがプロジェクトにより適しているかを判断できます。カタログ
図 1. FPGA とマイクロコントローラーの概要
FPGAとマイクロコントローラーとは何ですか?
アン FPGA (Field-Programmable Gate Array) は、製造後にデジタル ロジックを構成できる集積回路の一種です。これは、並列信号処理パスや特殊な制御ロジックの作成など、カスタム ハードウェアの動作が必要な場合に PCB 設計で広く使用されています。ソフトウェア命令を実行する代わりに、FPGA は設計に基づいてハードウェア回路を構築します。そのため、ハードウェア レベルでの正確なタイミングと柔軟性が必要なタスクに適しています。PCB システムでは、メモリ、センサー、通信インターフェイスに接続するプログラマブル ロジック コアとして機能します。FPGA デバイスを使用して、ボード上にカスタム デジタル システムを直接実装します。
あ マイクロコントローラー は、プログラムされた命令を実行して電子システムを制御するように設計されたコンパクトな集積回路です。通常、単一チップ内にプロセッサ、メモリ、入出力インターフェイスが含まれており、組み込み PCB アプリケーションに最適です。マイクロコントローラーは、入力の読み取り、データの処理、LED、モーター、センサーなどの出力の制御に一般的に使用されます。これらは、ソフトウェアで書かれた一連の命令に従って順次動作します。PCB 設計では、単純なガジェットから複雑なシステムに至るまで、多くのデバイスのメイン制御ユニットとして機能します。そのシンプルさと統合により、制御指向のタスクによく選ばれています。
FPGAとマイクロコントローラーのコンポーネント
FPGAコンポーネント
• ロジック ブロック (構成可能なロジック ブロック - CLB)
これらは、デジタル演算を実行する FPGA のコア構築ユニットです。各論理ブロックには、ルックアップ テーブル (LUT)、フリップフロップ、およびマルチプレクサが含まれています。LUT は、真理値表を保存することによって組み合わせ論理関数を実装するために使用されます。フリップフロップは、シーケンシャル ロジックとタイミング制御のためのストレージを提供します。これらの要素を組み合わせることで、FPGA でカスタム デジタル回路を形成できます。
• プログラマブルな相互接続
インターコネクトは、FPGA 内の異なるロジック ブロックを接続するルーティング パスです。これらにより、構成された設計に基づいて信号が論理要素間を移動できるようになります。これらの接続は柔軟で、さまざまな回路レイアウトに合わせて再プログラムできます。ルーティング ネットワークは、信号が正しい宛先に効率的に到達することを保証します。この構造により、固定配線なしで複雑な回路を作成できます。
• 入力/出力 (I/O) ブロック
I/O ブロックは、FPGA を PCB 上の外部コンポーネントに接続します。センサー、メモリ、プロセッサなどのデバイスとの通信を処理します。これらのブロックは、さまざまな電圧レベルと信号規格をサポートします。これらは入力、出力、または双方向ポートとして構成できます。この柔軟性により、さまざまな外部システムとのシームレスな統合が可能になります。
• クロック管理ユニット
クロック管理ユニットは、FPGA 内のタイミングと同期を制御します。これらはクロック信号を生成し、チップのさまざまな部分に分配します。これらのユニットには、フェーズ ロック ループ (PLL) または遅延ロック ループ (DLL) が含まれる場合があります。安定したタイミングを維持して信頼性の高い動作を実現します。適切なクロック制御により、デザイン全体にわたって正確なデータ処理が保証されます。
• 組み込みメモリ ブロック (BRAM)
これらは、一時的なデータ保存に使用される内蔵メモリ ユニットです。これらにより、FPGA 内で頻繁に使用されるデータに高速にアクセスできます。ブロック RAM は、さまざまなサイズとモードで構成できます。バッファリング、キャッシュ、データ処理タスクをサポートします。これにより、一部の設計では外部メモリの必要性が減ります。
マイクロコントローラーコンポーネント
• 中央処理装置 (CPU)
CPU は命令を実行する主な処理装置です。算術演算、論理演算、および制御演算を実行します。CPU はメモリから命令を読み取り、段階的に処理します。システム内のデータの流れを管理します。これにより、マイクロコントローラーのコアコントローラーになります。
• メモリ (フラッシュ、RAM、EEPROM)
マイクロコントローラーには、コードとデータを保存するためのさまざまなタイプのメモリーが含まれています。フラッシュ メモリにはプログラムが永久に保存されます。RAMは実行中の一時データに使用されます。EEPROM は、少量の不揮発性データを保存するために使用されます。各タイプは、システム運用において特定の役割を果たします。これらを組み合わせることで、信頼性の高いデータ処理がサポートされます。
• タイマーとカウンター
タイマーとカウンターは時間ベースの操作に使用されます。これらは、遅延の生成、時間間隔の測定、定期的なタスクの制御に役立ちます。これらのコンポーネントは、PWM 信号生成などの機能にとって重要です。イベントのカウントとスケジュール設定もサポートします。このため、制御システムや自動化システムで役立ちます。
• 入出力ポート (GPIO)
GPIO ピンを使用すると、マイクロコントローラーが外部デバイスと対話できるようになります。アプリケーションに応じて入力または出力として構成できます。これらのポートはセンサーから信号を読み取るか、アクチュエーターに信号を送信します。他のコンポーネントとのデジタル通信をサポートします。GPIO はシステム接続に適しています。
• 通信インターフェース
マイクロコントローラーには、UART、SPI、I2C などの通信モジュールが組み込まれています。これらのインターフェイスにより、他のデバイスとのデータ交換が可能になります。組み込みシステムで一般的に使用されるシリアル通信プロトコルをサポートします。これにより、センサー、ディスプレイ、その他のコントローラーへの接続が可能になります。これらのインターフェイスにより、システム統合が簡素化されます。
FPGA およびマイクロコントローラー システムのブロック図
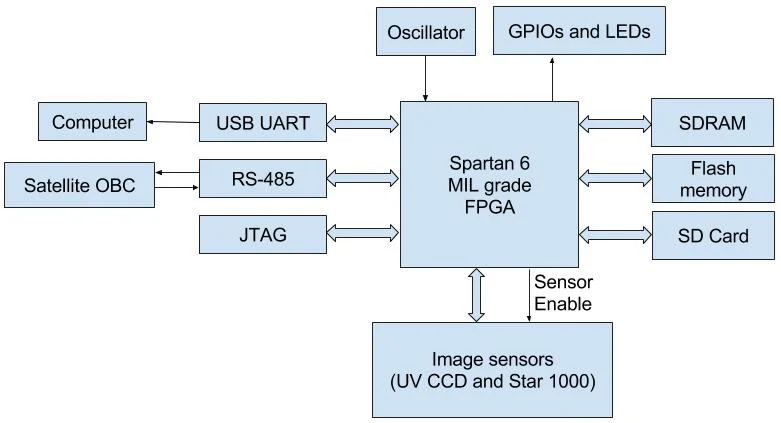
図 2. FPGA のブロック図
FPGA ブロック図は、柔軟なインターフェイスを介して複数の外部コンポーネントに接続された中央プログラマブル デバイスを示しています。通常、データ処理のために SDRAM やフラッシュ ストレージなどのメモリ モジュールにリンクします。UART、RS-485、JTAG などの通信インターフェイスにより、外部システムやデバッグ ツールとの対話が可能になります。この図には、センサーと制御信号の入出力接続も含まれています。クロック ソースは、同期動作を保証するためのタイミング信号を提供します。この構造は、FPGA がシステム内の中央ロジック ハブとしてどのように機能するかを示しています。固定された内部アーキテクチャを使用せずに、ペリフェラル間のデータ フローを管理します。
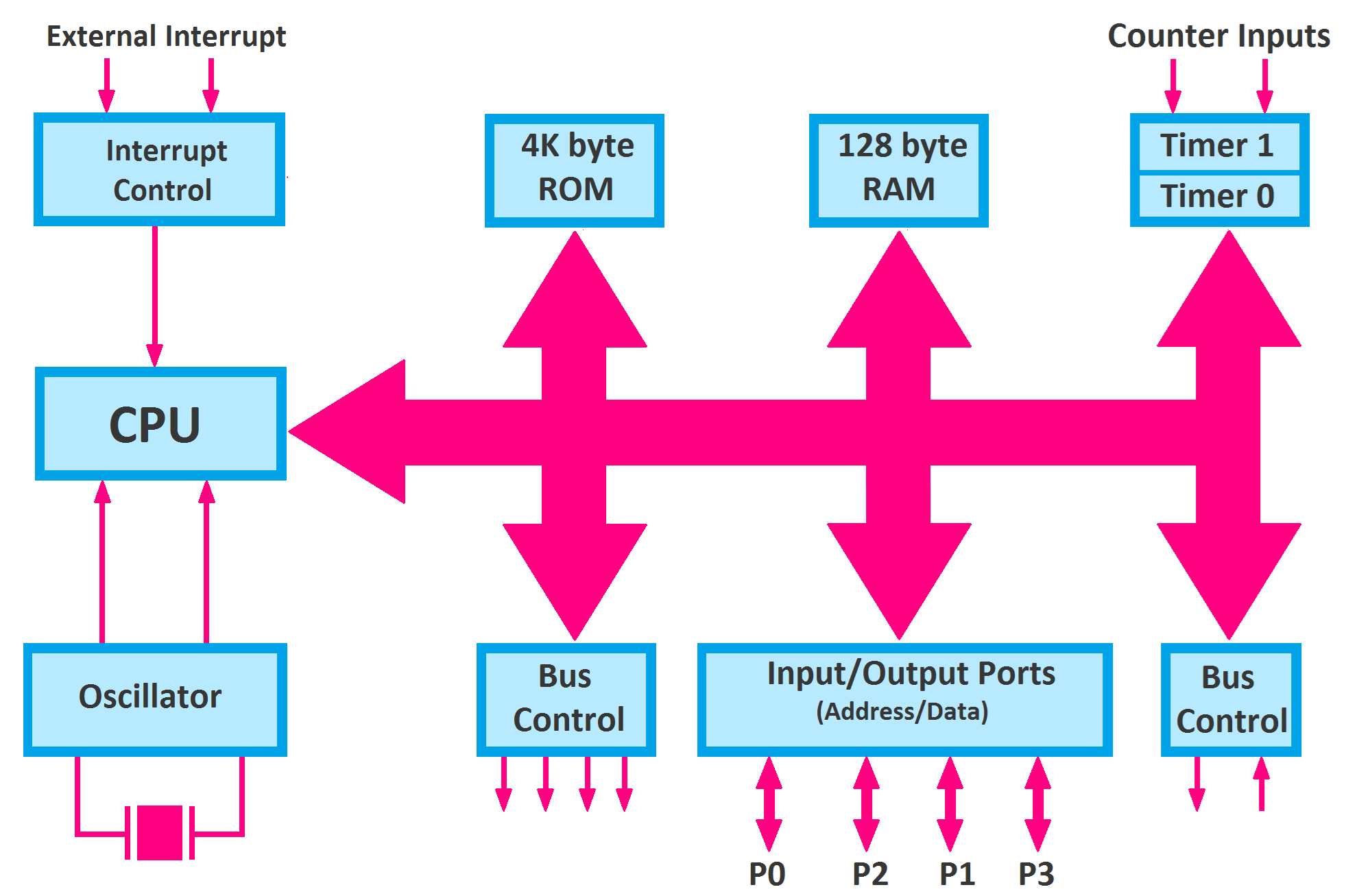
図 3. マイクロコントローラーのブロック図
マイクロコントローラのブロック図は、バス システムを介して内部メモリおよび周辺機器に接続された集中処理ユニットを示しています。CPU は ROM および RAM と通信して命令を実行および保存します。入出力ポートにより、センサーやディスプレイなどの外部デバイスとの対話が可能になります。タイマーとカウンターは、システム内のタイミング関連の操作を処理します。発振器は、動作全体を駆動するクロック信号を提供します。割り込み制御は、外部および内部のイベント処理を管理します。この構造は、制御タスク用に設計されたコンパクトで統合されたシステムを示しています。
FPGAの長所と短所
|
利点 |
短所 |
|
高い柔軟性
ハードウェア構成により、カスタムデジタル回路設計が可能になります。 |
複雑なデザイン
ハードウェア記述言語を必要とするプロセス。 |
|
真のサポート
並列処理による高速動作を実現します。 |
コストが高い
より単純な組み込みソリューションと比較して。 |
|
再プログラム可能
異なるアプリケーションに対して複数回。 |
より長い
設計とテストによる開発時間。 |
|
扱える
複雑な信号処理とデータタスク。 |
必要なもの
専門的なツールと専門知識。 |
|
スケーラブル
高度なシステムに適したアーキテクチャ。 |
より高いパワー
一部のデザインでは消費されます。 |
マイクロコントローラーの長所と短所
|
利点 |
短所 |
|
低コストかつ
多くの用途に広く利用可能です。 |
限定
複雑なタスクのための処理能力。 |
|
プログラムが簡単
C/C++ などの一般的な言語を使用します。 |
シーケンシャル
実行により並列処理が制限されます。 |
|
統合された
コンポーネントにより、外部ハードウェアの必要性が軽減されます。 |
限られたメモリ
大規模なシステムと比較して。 |
|
低電力
ポータブルデバイスに適した消費量。 |
柔軟性が低い
ハードウェア構成。 |
|
迅速な開発
組み込みシステムのサイクル。 |
パフォーマンス
固定アーキテクチャに依存します。 |
コードの比較: FPGA とマイクロコントローラーのプログラミング
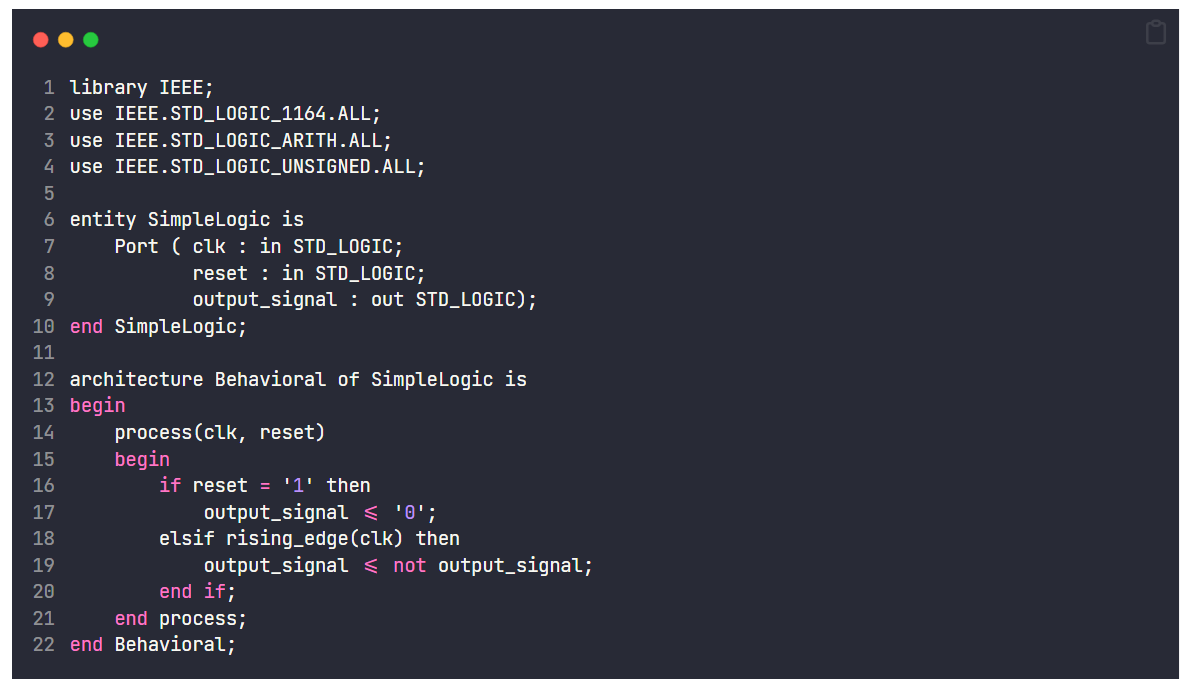
FPGA コード例では、VHDL などのハードウェア記述言語を使用して回路の動作を定義します。命令を記述する代わりに、コードは信号がどのように変化し相互作用するかを記述します。これは、入力、出力、およびシステムがクロック信号にどのように応答するかを定義します。構造には、設計を編成するためのエンティティとアーキテクチャが含まれます。プロセス ブロックは、クロック エッジなどのイベントに基づいて信号を更新する方法を制御します。このアプローチでは、連続したコマンドを実行するのではなく、ハードウェアの動作を直接モデル化します。FPGA 内でカスタム デジタル ロジックを作成できます。
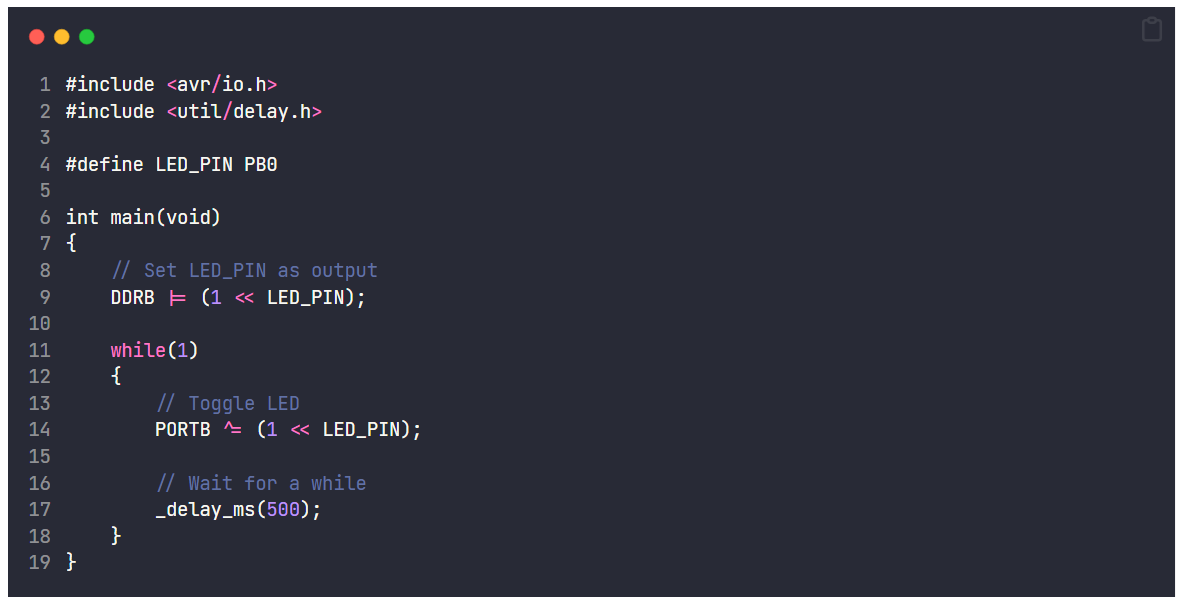
マイクロコントローラーのコード例では、C などのプログラミング言語を使用して命令を段階的に実行します。まず、ハードウェア レジスタを設定し、ピン構成を定義します。main 関数は継続的に実行され、ループ内のタスクを実行します。命令は、LED のオン/オフなどの出力を制御します。遅延関数は、タイミング効果を作成するために使用されます。このアプローチは、順次実行モデルに従います。シンプルで組み込みシステムのプログラミングに広く使用されています。
FPGA とマイクロコントローラーのアプリケーション
1. 産業用オートメーションシステム
FPGA は産業用機械の制御および信号処理に使用されます。高速データと正確なタイミング要件を処理します。マイクロコントローラーは、オートメーション システムのセンサー、モーター、制御ロジックを管理します。これらを組み合わせることで、信頼性の高い効率的な運用が可能になります。この組み合わせにより、システムのパフォーマンスと制御が向上します。
2. 家庭用電化製品
マイクロコントローラーは、洗濯機、テレビ、リモコンなどのデバイスで広く使用されています。ユーザー入力とシステム機能を効率的に管理します。FPGA は、ビデオ処理ユニットなど、高速データ処理を必要とする高度なデバイスで使用されます。これらのアプリケーションは、コンパクトで効率的な設計の恩恵を受けます。どちらのテクノロジーも最新の電子製品をサポートしています。
3. 通信システム
FPGA は、データ ルーティングと信号処理のためのネットワーク機器で使用されます。高速通信プロトコルをサポートします。マイクロコントローラーは、通信デバイスの制御および監視機能を処理します。これらの役割により、安定した効率的なデータ伝送が保証されます。これは現代の通信インフラストラクチャでは重要です。
4. 医療機器
マイクロコントローラーは、心臓モニターや輸液ポンプなどのデバイスの機能を制御します。これらは信頼性の高い低電力動作を保証します。FPGA は、高速データ処理のためにイメージング システムで使用されます。これらのアプリケーションには精度と信頼性が必要です。どちらのテクノロジーも医療システムをサポートします。
5. 自動車システム
マイクロコントローラーは、エンジン制御ユニット、センサー、安全システムを管理します。車両の効率的な運行を保証します。FPGA は、データ処理のための先進運転支援システムで使用されます。これらのシステムは安全性とパフォーマンスを向上させます。自動車エレクトロニクスは両方のテクノロジーに大きく依存しています。
6. 航空宇宙と防衛
FPGA は、高速データ処理と安全な通信システムに使用されます。これらは、複雑な信号分析と制御タスクをサポートします。マイクロコントローラーは、組み込みシステムの監視および制御機能を処理します。これらのアプリケーションでは、高い信頼性と精度が必要です。どちらのテクノロジーもミッションクリティカルなシステムで重要な役割を果たします。
FPGA vs マイクロコントローラー vs CPLD
|
特長 |
FPGA |
マイクロコントローラー |
CPLD |
|
ロジックリソース |
~10,000 ~ >1,000 万
論理ゲート (または LUT) |
該当なし
(CPUベース) |
~1K ~ ~100K
ゲート |
|
クロック速度 |
~50MHz~500MHz以上
MHz (設計に依存) |
~1MHz~600MHz
MHz (一般的な MCU)
|
~50MHz~200MHz
MHz |
|
加工スタイル |
真の平行
ハードウェアの実行 |
シーケンシャル
命令の実行 |
限定パラレル
ロジック |
|
構成
方法 |
SRAM/フラッシュベース
起動時にロードされるビットストリーム |
ファームウェアを保存
フラッシュメモリ内 |
不揮発性
構成 (EEPROM/フラッシュ) |
|
プログラミング
言語 |
VHDL、Verilog
(HDL) |
C、C++、アセンブリ |
VHDL、Verilog |
|
内部メモリ |
ブロック RAM: ~10
KB~数MB |
フラッシュ: ~8 KB–2
MB、RAM: ~2 KB ~ 512 KB |
非常に限られた
(数KB相当) |
|
I/Oピン |
~50 ~ 1000+
構成可能なI/O |
~6 ~ 200 GPIO
ピン |
~30 ~ 500 I/O |
|
パワー
消費 |
~1 W ~ 10+ W
(サイズ・デザインにより異なります) |
~1mW~500mW |
~10mW~1W |
|
起動時間 |
ミリ秒から秒
(設定の読み込みが必要) |
μs から ms
(フラッシュからインスタント) |
インスタント
(不揮発性) |
|
デザインエントリー |
ハードウェア回路
定義 |
ソフトウェアプログラム
開発 |
ロジック設計
(FPGAよりも簡単) |
|
外部
コンポーネント |
多くの場合必要になります
外部メモリ (DDR、フラッシュ) |
最小限(通常は
スタンドアロン) |
最小限の外部
コンポーネント |
|
再構成 |
完全に
再プログラム可能、無制限のサイクル |
再プログラム可能
ファームウェア |
再プログラム可能
ただしサイズに限りがあります |
|
一般的な使用方法
スケール |
高度な複雑性
デジタルシステム |
小規模から中規模
組み込みシステム |
小さな制御
およびインターフェースロジック |
|
開発
サイクル |
数週間から数か月 |
数日から数週間 |
数日から数週間 |
結論
FPGA とマイクロコントローラーの主な違いは、データの処理方法にあり、FPGA はハードウェアベースの並列実行を提供し、マイクロコントローラーは逐次的なソフトウェア制御に依存します。内部コンポーネント、システム構造、プログラミング方法にはこれらの違いが反映されており、それぞれが特定のアプリケーションに適しています。FPGA は高速でカスタマイズ可能なロジック タスクに優れており、マイクロコントローラーは制御指向でコスト効率の高い設計に最適です。これらは連携して、オートメーション、通信、自動車、医療システムなどの業界全体で重要な役割を果たしています。
関連情報
ALLELCO LIMITED
もっと見る
クイックお問い合わせ
お問い合わせを送ってください、すぐに返信します。
一般的な問題 [FAQ]
1. FPGA は PCB 設計のマイクロコントローラーを置き換えることができますか?
はい、ただしそれはアプリケーションによって異なります。FPGA は制御機能を複製できますが、単純なタスクの場合はマイクロコントローラーに比べて複雑でコストがかかることがよくあります。
2. マイクロコントローラーは FPGA よりも電力効率が高いのはなぜですか?
マイクロコントローラーは、統合されたコンポーネントとスリープ モードにより、低電力動作向けに最適化されています。FPGA は、構成可能なロジックと並列処理により、より多くの電力を消費します。
3. FPGA にはマイクロコントローラーのようなオペレーティング システムが必要ですか?
いいえ、FPGA はハードウェア ロジックを直接実装するため、オペレーティング システムを必要としません。マイクロコントローラーは OS なしでも実行できますが、複雑なアプリケーションには OS を使用する場合があります。
4. 1 つのシステムで FPGA とマイクロコントローラーの両方を使用できますか?
はい、多くのシステムは両方を組み合わせています。FPGAは高速処理を処理し、マイコンは制御および通信タスクを管理します。
5. FPGA およびマイクロコントローラーの開発にはどのようなプログラミング言語が使用されますか?
FPGA は VHDL や Verilog などのハードウェア記述言語を使用しますが、マイクロコントローラーは通常 C または C++ を使用してプログラムされます。
初心者向けフォトカプラ完全ガイド
03/30/2026で公開されています
プリント基板用ヒートシンクの取り付け方法と選定ガイド
03/27/2026で公開されています
ホットポスト
-

複雑な命令セットコンピューター:コンピューティングをどのように変更しましたか?
04/19/8000で公開されています 147781
-

USB-Cピンアウトと機能
04/19/2000で公開されています 112051
-
Xilinx Unified Simulation Primitivesの使用:FPGAの設計とシミュレーションの包括的なガイド
04/19/1600で公開されています 111352
-

電子機器における電源電圧: VCC、VDD、VEE、VSS、および GND の意味
04/19/0400で公開されています 83806
-

RJ45コネクタガイド:ピンアウト、配線、ケーブルタイプ、および使用
01/1/1970で公開されています 79610
-

現代の電気システムにおけるワイヤカラーコードの究極のガイド
電気システムの使用方法は、色だけではありません。各ワイヤーの色は特定の機能を示し、設置とメンテナンス中に電気コンポーネントを正しく識別して処理しやすくなります。これは、運用プロセスをスピードアップするだけでなく、間違いの可能性を減らし、ユーザーと技術者の両方を安全に保つのに役立ちます。この記事では、ワイヤーカラーコードの重要性、安全性と機能への影響、およびそれらを導くグローバル基準について説...01/1/1970で公開されています 66991
-

パージバルブガイド:機能、症状、テスト、および最適なエンジン性能の交換
パージバルブは、大気に逃げる前に燃料蒸気を管理することで空気を清潔に保つのに役立つ車のシステムの重要な部分です。これは、汚染を減らすことで環境を支援するだけでなく、車の走行を改善し、燃料をより効率的に使用するようにします。この記事では、パージバルブの作業方法、タイプ、適切に機能しているかどうかを確認する方法など、パージバルブの詳細について説明します。 <h2 style=...01/1/1970で公開されています 63115
-

品質(Q)係数:方程式とアプリケーション
質の高い要因、または「Q」は、無線周波数(RF)を使用する電子システムでインダクタと共振器がどれだけうまく機能するかをチェックするときに重要です。「Q」は、回路がエネルギーの損失を最小限に抑え、システムが主要な周波数を中心に処理できる周波数の範囲にどの程度適切に影響するかを測定します。インダクタ、コンデンサ、および調整された回路を備えたシステムでは、より高い「Q」は、回路が特定の周波数に焦点...01/1/1970で公開されています 63051
-

最大電力伝達定理でピーク性能を達成します
最大電力伝達定理は、バッテリーや発電機などのソースからのエネルギーが接続荷重にどのように流れるかを説明します。これは、負荷が最もパワーを受ける正確な条件を示しています。この記事では、定理の意味、DC回路とAC回路の両方でどのように機能するか、その背後にある証拠、その実生活のアプリケーション、およびその利点と短所について説明します。最後に、この原則がソーラーパネル、ラジオ、スピーカー、さらには...01/1/1970で公開されています 54097
-

A23バッテリー仕様と互換性
A23バッテリーは、高電圧の小さなシリンダー型のバッテリーです。23A、23AE、またはMN21とも呼ばれ、12ボルトで走行し、AAまたはAAAバッテリーよりもはるかに高くなっています。その特別なデザインにより、小さいながらも強力な電源が必要なガジェットに最適です。この記事では、A23バッテリーの機能、パフォーマンス、および使用について説明します。さまざまなブランドやその他...01/1/1970で公開されています 52201
ホットパーツ番号
-

STM32L031K6U6
STMicroelectronics
IC MCU 32BIT 32KB FLASH 32UFQFPN
MC78M15CDT
onsemi
IC REG LINEAR 15V 500MA DPAK
MRF7S21170HS
NXP USA Inc.
FET RF 65V 2.17GHZ NI-880S
MM74HC138N
onsemi
IC DECODER/DEMUX 1X3:8 16DIP
TC647VOA
Microchip Technology
IC MOTOR DRIVER 3V-5.5V 8SOIC
HMJ325B7224KNHT
Taiyo Yuden
CAP CER 0.22UF 100V X7R 1210
BD5241G-TR
Rohm Semiconductor
IC SUPERVISOR 1 CHANNEL 5SSOP
RP131K101D-TR
Nisshinbo Micro Devices Inc.
IC REG LINEAR 1V 1A DFN1820-6
RTQ2965GSP-QA
Richtek USA Inc.
IC REG BUCK ADJ 5A 8SOP
MAX8869EUE18+T
Analog Devices Inc./Maxim Integrated
IC REG LIN POS ADJ 1A 16TSSOP
NL565050T-152J-PF
TDK Corporation
FIXED IND 1.5MH 70MA 20 OHM SMD
TAJB475M035RNJ
KYOCERA AVX
CAP TANT 4.7UF 20% 35V 1411
74VHC4053MTC
onsemi
IC SWITCH SPDTX3 100OHM 16TSSOP
RCLAMP1624T.TCT
Semtech Corporation
TVS DIODE 5VWM 15VC SLP1710P4T
RT0402DRD0762RL
YAGEO
RES SMD 62 OHM 0.5% 1/16W 0402
SBR12U100P5-13
Diodes Incorporated
DIODE SBR 100V 12A POWERDI5
SS25FA
onsemi
DIODE SCHOTTKY 50V 2A SOD123FL
NC7SP157L6X
onsemi
IC MULTIPLEXER 1 X 2:1 6MICROPAK -

TPSD157M010R0100
KYOCERA AVX
CAP TANT 150UF 20% 10V 2917
S2S4LY0F
SHARP/Socle Technology
OPTOISOLATOR 3.75KV TRIAC 4SMD
IRU1010CY
Infineon Technologies
IC REG LINEAR POS ADJ 1A SOT223
ADC1410S125HN-C18
Renesas Electronics America Inc
IC ADC 14BIT PIPELINED 40HVQFN
MAX9986ETP+T
Analog Devices Inc./Maxim Integrated
IC MIXER 815MHZ-1GHZ DWN 20TQFN
ACS733KLATR-65AB-T
Allegro MicroSystems
SENSOR CURRENT HALL 65A 16SOIC
S-1313D30-A4T1U3
ABLIC Inc.
IC REG LINEAR 3V 200MA HSNT4-A
MM5Z13V
onsemi
DIODE ZENER 13V 200MW SOD523F
P1602ACL
Littelfuse Inc.
THYRISTOR 65V/130V 400A TO220-3
IRFR3708TRLPBF
Infineon Technologies
MOSFET N-CH 30V 61A DPAK
C2012C0G2A222J085AA
TDK Corporation
CAP CER 2200PF 100V C0G 0805
ISL84544IP
Renesas Electronics America Inc
IC SWITCH SPDT X 1 60OHM 8DIP
EL4332CS
Elantec
VIDEO AMPLIFIER
PE-1008CD181GTT
Pulse Electronics
FIXED IND 180NH 620MA 770MOHM SM
AP2113MTR-G1
Diodes Incorporated
IC REG LDO DC FAN 1OUT 8SOIC
B37940K5220J060
EPCOS - TDK Electronics
CAP CER 22PF 50V NP0 0805
MC33171DR2G
onsemi
IC OPAMP GP 1 CIRCUIT 8SOIC
DMG3414UQ-7
Diodes Incorporated
MOSFET N-CH 20V 4.2A SOT23-3 -

R1501J033B-T1-FE
Nisshinbo Micro Devices Inc.
IC REG LINEAR 3.3V 1A TO252-5-P2
GRM216R71H332KA01J
Murata Electronics
CAP CER 3300PF 50V X7R 0805
LES25A48-1V5RE
Artesyn Embedded Power
DC DC CONVERTER 1.5V 37W
06031A430JAT2A
AVX Corporation
CAP CER 43PF 100V NP0 0603
MAX9634TEUK+T
Analog Devices Inc./Maxim Integrated
IC CURR SENSE 1 CIRCUIT SOT23-5
VLF302512MT-1R5N
TDK Corporation
FIXED IND 1.5UH 2.54A 44MOHM SMD
VE-272-CX
Vicor Corporation
DC DC CONVERTER 15V 75W
74AHC139PW,118
Nexperia USA Inc.
IC DECODER/DEMUX 1X2:4 16TSSOP
HI7190IP
Renesas Electronics America Inc
IC ADC 24BIT SIGMA-DELTA 20DIP
T491A226K006AT
KEMET
CAP TANT 22UF 10% 6.3V 1206
74ACT715SCX
onsemi
IC VIDEO SYNC 20SOIC
2308A-1HDCG
Renesas Electronics America Inc
IC MULT ZDB 16SOIC
TLV70213DBVR
Texas Instruments
IC REG LINEAR 1.3V 300MA SOT23-5
LMK105BBJ475MVLF
Taiyo Yuden
CAP CER 4.7UF 10V X5R 0402
MMFT5P03HDT1
onsemi
MOSFET P-CH 30V 3.7A SOT223
PMR400UN,115
NXP USA Inc.
MOSFET N-CH 30V 800MA SC75
TPS3836L30QDBVRQ1
Texas Instruments
IC SUPERVISOR 1 CHANNEL SOT23-5
TLE2022AIDRG4
Texas Instruments
IC OPAMP GP 2.8MHZ 8SOIC