制御システムの概要: 仕組み、種類、応用
機械が温度、速度、レベルなどの値を自動的に一定に保つときは常に、制御システムを使用します。この記事では、制御システムとは何か、その各部分がどのように連携するか、フィードバックによってどのように出力が正しく維持されるかについて説明します。また、システムの主なタイプと、それらが動作中にどのように動作するかについても説明します。一般的な使用法、利点、制限事項が含まれています。カタログ
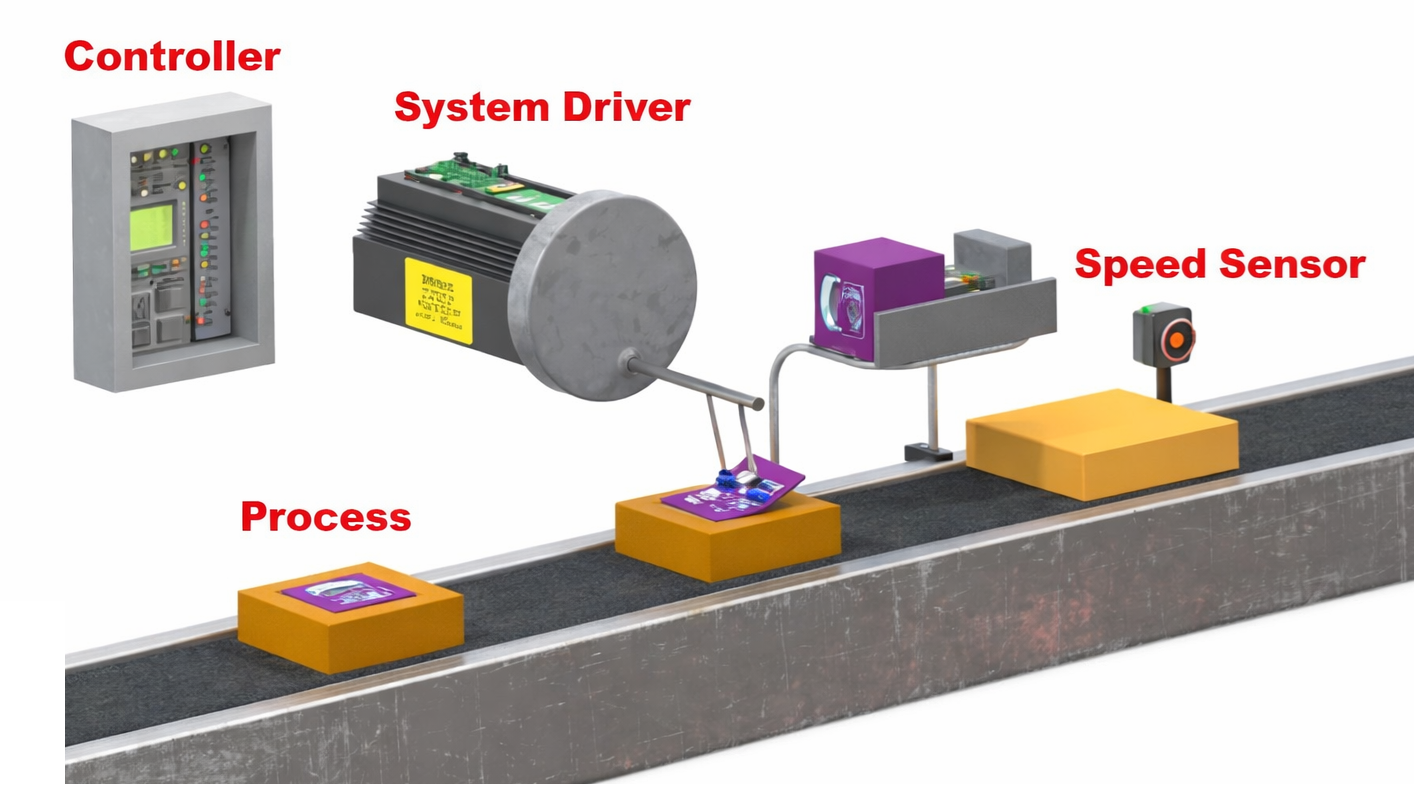
図 1. 制御システムの例
制御システムとは何ですか?
制御システムは、測定値を所望の目標値に近づけるシステムです。その目的は、条件が変化しても出力が正しい状態を保つようにプロセスを自動的に調整することです。たとえば、室内のサーモスタットは温度を設定レベル付近に保ち、車のクルーズ コントロールは車両を選択された速度に保ちます。水タンクレベルコントローラーも、水の高さを選択したマークに維持します。簡単に言うと、制御システムは変数を継続的にチェックし、必要な値と一致するように修正します。
制御システムの基本要素
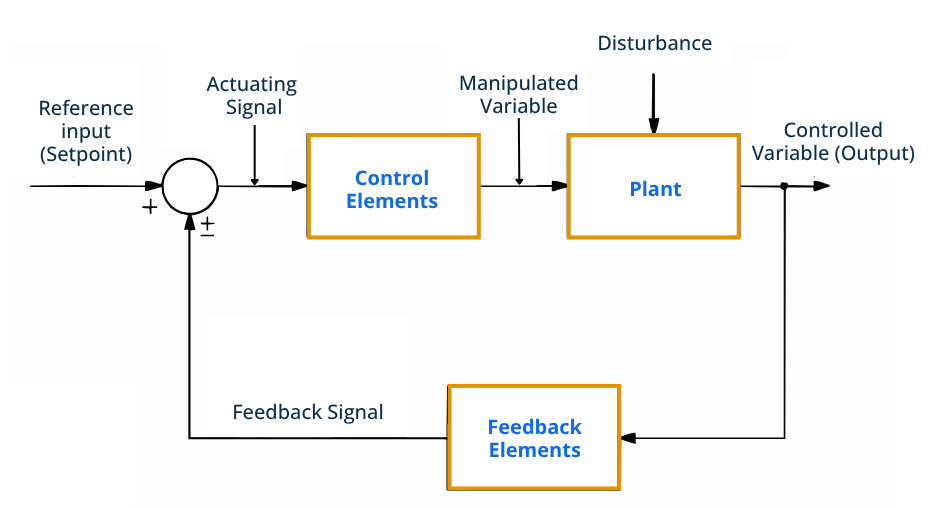
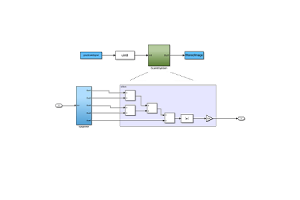
図 2. 制御システムのブロック図
制御システムはいくつかの標準部品で構成されており、それぞれが特定のタスクを実行します。
• 基準入力(設定値)
これは、システムが維持しようとする望ましい値です。選択した対象条件を表します。システムは常に実際の値をこの基準値と比較します。
• 作動信号
これは、望ましい値と実際の値を比較した後に生成される信号です。どれくらいの調整が必要かを表します。信号はシステムの補正の準備を整えます。
• 制御要素
これらの部分は意思決定プロセスを処理します。受信した信号に基づいて是正措置を決定します。この段階からの出力により、調整プロセスの準備が整います。
• 操作変数
これは、プロセスに送られる調整可能な量です。この値を変更すると、最終的な出力に影響します。これはシステムが直接変更できる変数です。
• 工場
プラントは制御されるプロセスです。最終的な出力値が生成されます。システムは、この出力を望ましいレベルに維持することを目的としています。
• 妨害
これはプロセスに影響を与える望ましくない変更です。出力が望ましい値から遠ざかる可能性があります。システムはそれを補償する必要があります。
• 制御変数(出力)
これはプロセスの実測結果です。システムの現状を示します。目標は、基準入力と等しく保つことです。
• フィードバック要素
これらは出力を測定し、チェックのために情報を送り返します。これらはシステムに現在の状態を提供します。これにより、補正を決定することができる。
• フィードバック信号
これは、出力値について返された情報です。プロセスの状態を表します。システムはそれを比較に使用します。
制御システムの動作原理
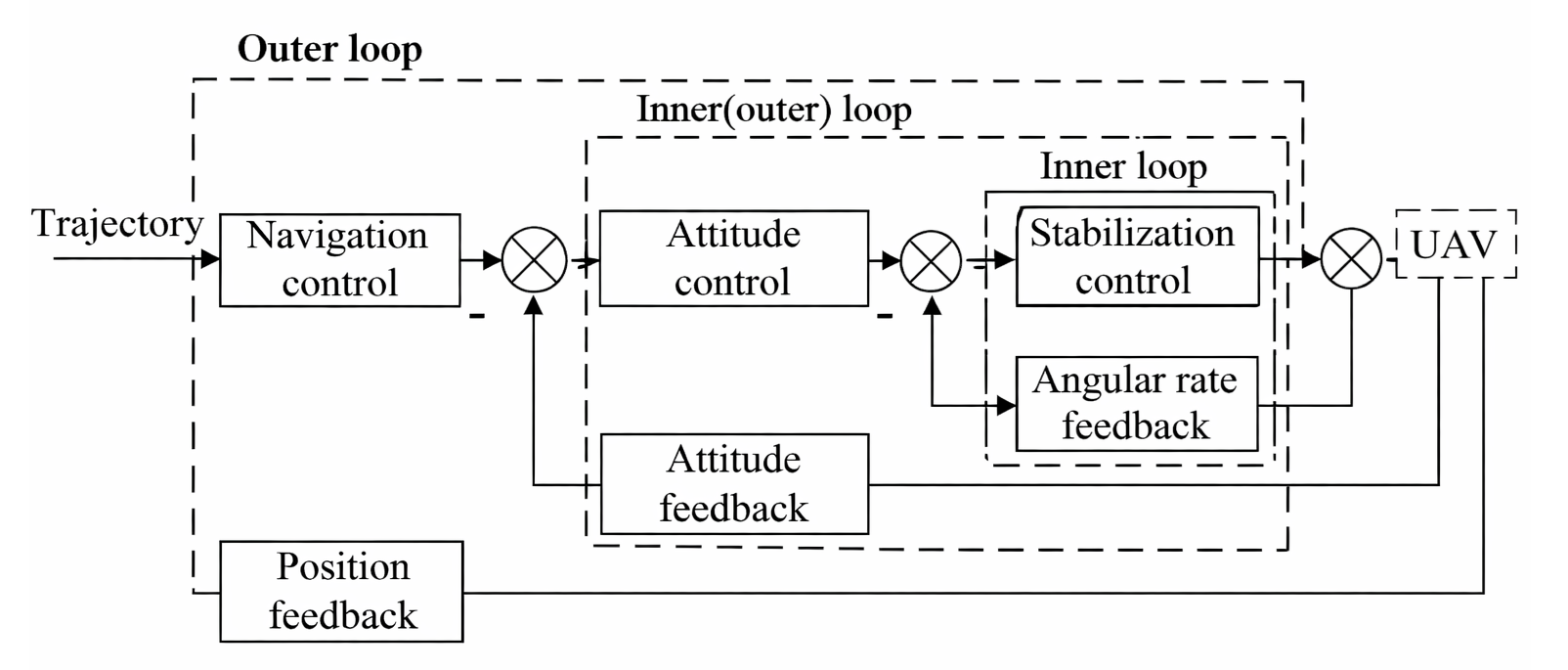
図 3. 制御システムの動作原理
制御システムの動作原理は、システムに所望の入力値が与えられることから始まります。次に、システムはこの値を実際の出力値と比較します。それらの差はエラー信号と呼ばれます。エラーが存在する場合、システムは修正信号を生成します。この修正によりプロセスが調整され、エラーが減少します。出力が変化し、継続的に再度チェックされます。このサイクルは、出力が目的の値にほぼ一致するまで繰り返されます。
制御システムの特徴
制御システムは、動作中にどれだけうまく機能するかに基づいて評価されます。これらの特性は、システム応答の品質と信頼性を表します。
|
特徴 |
説明 |
|
安定性 |
出力は次のとおりです
発散しない。外乱後に定常値に戻る |
|
精度 |
最終誤差 ≤
設定値の±2~5% |
|
精度 |
出力
同一入力下での変動 ≤ ±1% |
|
応答時間
|
イニシャル
測定された遅延時間 (td) 以内に反応が発生します |
|
立ち上がり時間 |
10%からの時間
最終値の90%まで |
|
セトリングタイム |
入って、
±2%の範囲内に留まります |
|
オーバーシュート |
ピークを超える
% 量による最終値 |
|
定常状態
エラー |
定数
安定化後に残るオフセット |
|
感度 |
Δ出力 /
Δパラメータ変化率 |
|
堅牢性 |
維持します
外乱変化にもかかわらず動作 |
|
帯域幅 |
動作します
実質的に最大 -3 dB のカットオフ周波数 |
|
再現性 |
同じ入力
許容範囲内で同じ出力を生成します |
|
信頼性 |
動作します
定格動作時間 (MTBF) で故障なし |
|
ダンピング |
発振
減衰は減衰比 ζ によって決まります |
|
の速度
応答 |
までの合計時間
安定した状態に達する |
制御システムの種類
制御システムは、情報、信号、および応答動作の処理方法に基づいて分類されます。これらは、フィードバックの使用法、信号形式、数学的動作に従ってグループ化されています。
オープンループ制御システム
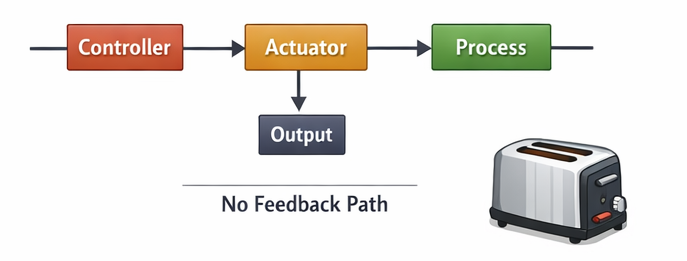
図 4. オープンループ制御システムの図
開ループ制御システムは、出力が制御動作に影響を与えないシステムです。システムはコマンドを送信し、結果をチェックせずに正しいものとみなします。フィードバック パスがないため、エラーや障害を自動的に修正することはできません。性能は主に適切な校正と動作条件に依存します。これらのシステムはシンプルで低コストで、設計も簡単です。ただし、負荷や環境の変化が最終結果に影響を与える可能性があります。一般的な例には、電気トースターのタイマー、洗濯機のタイマー制御、固定灌水タイマーなどがあります。
閉ループ制御システム
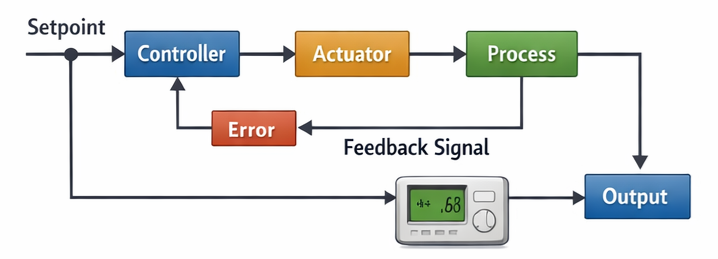
図 5. 閉ループ制御システムの図
閉ループ制御システムは、フィードバックを使用して出力を自動的に調整するシステムです。システムは結果を測定し、それを目的の値と比較します。差異が生じた場合は、誤差を減らすために補正が適用されます。この継続的な調整により、状況が変化しても正確で安定した動作が可能になります。閉ループ システムは、開ループ システムよりも優れた精度と信頼性を提供します。これらは最新の自動制御アプリケーションで広く使用されています。代表的な例としては、エアコンの温度制御、車両のクルーズ コントロール、自動電圧調整器などがあります。
連続時間制御システム
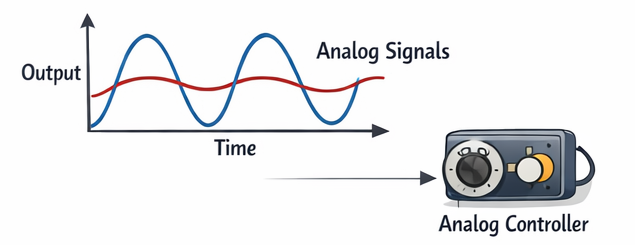
図 6. 連続時間 (アナログ) 制御信号
連続時間制御システムは、時間の経過とともに滑らかに変化する信号を処理します。入力と出力はあらゆる瞬間に途切れることなく存在します。これらのシステムは通常、アナログの電気信号または機械信号を使用して動作します。信号が連続しているため、レスポンスもスムーズで自然です。連続時間システムは、従来のアナログ コントローラーでよく見られます。即時反応が必要な物理プロセスに適しています。例としては、アナログ速度調整器、オーディオアンプの音量制御、油圧バルブ位置制御などがあります。
離散時間制御システム
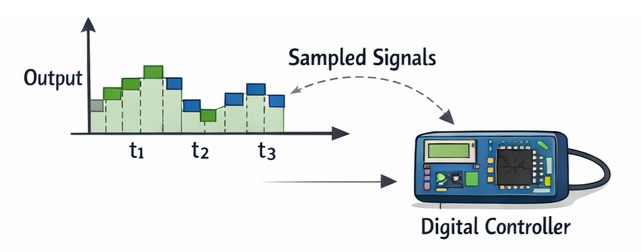
図 7. 離散時間 (デジタル) 制御信号
離散時間制御システムは、サンプリングされたデータ信号を使用して動作します。システムは、特定の時間間隔でのみ値をチェックおよび更新します。これらの信号は通常、デジタル コントローラーまたはマイクロプロセッサーによって処理されます。出力は連続的にではなく段階的に変化します。このようなシステムでは、プログラム可能な操作と柔軟な調整が可能です。これらは、現代の電子制御およびコンピュータベースの制御で広く使用されています。例には、マイクロコントローラーベースの温度制御、デジタルモーター速度制御、スマートホームサーモスタットなどがあります。
リニア制御システム
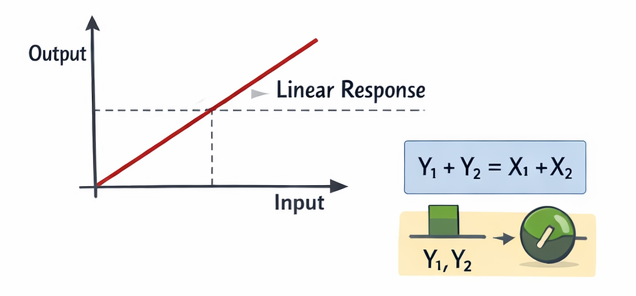
図 8. 線形システムの入出力関係
線形制御システムは、入力と出力間の比例関係に従います。入力が2倍になれば、同じ条件下では出力も2倍になります。これらのシステムは、結合された入力が結合された出力を生成するという重ね合わせの原理を満たします。線形動作により、予測可能で簡単な数学的分析が可能になります。ほとんどの理論的な制御設計は、簡単にするために線形動作を前提としています。線形モデルは、安定した正確なシステムの設計に役立ちます。例には、小信号電子アンプや低負荷モーター制御領域が含まれます。
非線形制御システム
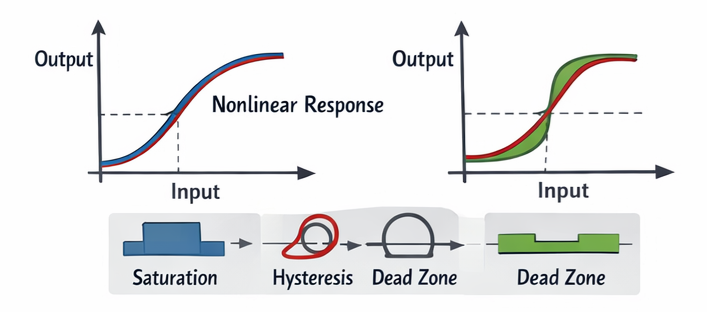
図 9. 非線形システム応答特性
非線形制御システムには、入力に比例しない出力があります。動作範囲や条件により応答性は変化します。小さな入力変化が大きな出力変動を引き起こすか、まったく変化しない場合があります。飽和、ヒステリシス、デッドゾーンなどの影響が現れることがよくあります。これらのシステムは分析が困難ですが、物理プロセスをより正確に表します。多くのシステムは自然に非線形に動作します。例としては、ロボット アームの動作制限、磁気アクチュエータの動作、極端な位置でのバルブ流量制御などが挙げられます。
制御システムの長所と短所
制御システムは一貫性を高め、手作業を軽減しますが、複雑さとコストも発生します。
制御システムの利点
• システムは動作中に出力を必要な値に近づけます。
• オペレータは手動で機器を調整し続ける必要がありません。
• 機械は頻繁に停止することなく、長時間稼働できます。
• システムは状態の変化を自動的に修正します。
・運転状況をパネルや遠隔表示器から確認できます。
制御システムの欠点
• セットアップコストは単純な手動システムよりも高くなります。
• セットアップとサービスには熟練した作業者が必要です。
• センサーや電子部品は時間の経過とともに故障する可能性があります。
• 問題の原因の特定には時間がかかる場合があります。
• システムは安定した電力に依存しています。
制御システムの応用
制御システムは、適切な動作を自動的に維持するために、産業オートメーションと日常機器の両方で使用されます。
1. 工業製造業
生産機械は一貫した製品寸法と品質を維持します。自動組立ラインでは、再現性を確保するために規制が使用されます。これにより無駄が削減され、効率が向上します。
2. 温度調節
冷暖房設備により快適な環境を維持します。建物は室内環境を安定させるために自動調整に依存しています。これにより、エネルギー効率と快適性が向上します。
3. 交通機関
車両は、よりスムーズな動作を実現するために、速度と安定性の制御を使用します。現代の車にはクルーズ コントロールとトラクション システムが搭載されています。これらにより、運転の安全性とパフォーマンスが向上します。
4. 電力システム
電気ネットワークは電圧と周波数のレベルを調整します。発電機は負荷需要に合わせて出力を調整します。これにより安定した電力供給が可能となります。
5. ロボット工学と自動化
ロボットは正確な位置決めと動作タスクを実行します。自動化された機械は高精度で継続的に稼働します。これにより、高度な製造が可能になります。
6. 医療機器
治療中、装置は制御された動作条件を維持します。監視装置は値を安全な範囲内に保ちます。これにより、患者の安全性と信頼性が向上します。
7. 家電製品
日常的に使用されている機器が動作設定を自動管理します。洗濯機や冷蔵庫は正常な動作状態を維持します。これにより、日常業務が簡素化されます。
8. 航空宇宙システム
航空機やドローンは安定した飛行状態を維持します。自動ガイダンスにより正しい方位と高度が維持されます。信頼性の高いナビゲーションをサポートします。
制御システム vs オートメーション vs 組み込みシステム
これらのテクノロジーは密接に関連していますが、最新の電子製品や工業製品内で異なるエンジニアリング目的を果たします。
|
特徴 |
制御
システム |
自動化 |
埋め込み型
システム |
|
主な焦点 |
の規制
変数 |
プロセス
実行 |
デバイス
操作 |
|
目的 |
維持する
希望の値 |
タスクを実行する
自動的に |
専用の実行
機能 |
|
範囲 |
具体的な
プロセスの動作 |
全体
ワークフロー
|
シングル
製品デバイス |
|
決定
能力 |
に基づいて
測定値 |
に基づいて
プログラムされたロジック |
に基づいて
ファームウェア |
|
フィードバックの使用 |
多くの場合
必須 |
オプション |
オプション |
|
ハードウェアの種類 |
センサーと
アクチュエータ |
機械と
コントローラー |
マイクロコントローラー
ボード |
|
ソフトウェアの役割 |
計算
そして修正 |
シーケンス
と調整 |
デバイス
制御ロジック |
|
応答タイプ |
継続的
調整 |
タスク
実行 |
機能動作 |
|
システムサイズ |
小さいから
中程度 |
中~
大きい |
とても小さい |
|
柔軟性 |
中等度 |
高 |
限定 |
|
時間
要件 |
高 |
中等度 |
高 |
|
アプリケーション
レベル |
プロセスレベル |
植物レベル |
製品レベル |
|
例 |
温度
コントロール |
工場
生産ライン |
スマートウォッチ |
|
統合 |
の一部
自動化 |
含まれています
制御システム |
両方をサポート |
結論
制御システムは、実際の出力と目標値を継続的に比較し、誤差を修正することで安定性を維持します。そのパフォーマンスは、フィードバック、コントローラーのアクション、制御されたプロセスなどのコア要素に依存します。信号がどのように処理されるか、およびシステムが外乱にどの程度正確に応答するかは、さまざまな分類によって定義されます。これらの機能により、制御システムは産業、輸送、エネルギー、医療機器、日常機器などに広く適用されています。
関連情報
ALLELCO LIMITED
もっと見る
クイックお問い合わせ
お問い合わせを送ってください、すぐに返信します。
一般的な問題 [FAQ]
1. コントローラーと制御システムの違いは何ですか?
コントローラーは単なる意思決定デバイスです (PLC や PID コントローラーなど)。制御システムには、コントローラーとセンサー、アクチュエーター、および調整されるプロセスが含まれます。
2. PID 制御とは何ですか?なぜ重要ですか?
PID 制御は、比例、積分、および微分動作を使用して、エラーを迅速かつスムーズに最小限に抑えます。ほとんどの産業用システムの安定性、精度、応答速度が向上します。
3. 制御システムが時々発振したりハンチングしたりするのはなぜですか?
発振は、補正が強すぎるか遅れた場合に発生します。チューニングが不十分、センサーが遅い、またはゲインが過剰であると、出力が繰り返しオーバーシュートします。
4. アクチュエータの飽和とは何ですか?
アクチュエータの飽和は、アクチュエータが物理的限界に達し、それ以上出力を増やすことができないときに発生します。これにより、システムが大きなエラーを修正できなくなります。
5. 制御システムはプロセスの遅延にどのように対処しますか?
調整方法、フィルター、または予測アルゴリズムを使用して遅延を補正し、適切なタイミングで修正が行われるようにします。

4.7 kΩ 抵抗ガイド: カラー コード、用途、テスト、値の比較
02/16/2026で公開されています
ミニチュアサーキットブレーカー (MCB): 動作原理、タイプ、定格および選択ガイド
02/15/2026で公開されています
ホットポスト
-

複雑な命令セットコンピューター:コンピューティングをどのように変更しましたか?
04/17/8000で公開されています 147711
-

USB-Cピンアウトと機能
04/17/2000で公開されています 111670
-
Xilinx Unified Simulation Primitivesの使用:FPGAの設計とシミュレーションの包括的なガイド
04/17/1600で公開されています 111314
-

電子機器における電源電圧: VCC、VDD、VEE、VSS、および GND の意味
04/17/0400で公開されています 83579
-

RJ45コネクタガイド:ピンアウト、配線、ケーブルタイプ、および使用
01/1/1970で公開されています 79224
-

現代の電気システムにおけるワイヤカラーコードの究極のガイド
電気システムの使用方法は、色だけではありません。各ワイヤーの色は特定の機能を示し、設置とメンテナンス中に電気コンポーネントを正しく識別して処理しやすくなります。これは、運用プロセスをスピードアップするだけでなく、間違いの可能性を減らし、ユーザーと技術者の両方を安全に保つのに役立ちます。この記事では、ワイヤーカラーコードの重要性、安全性と機能への影響、およびそれらを導くグローバル基準について説...01/1/1970で公開されています 66751
-

品質(Q)係数:方程式とアプリケーション
質の高い要因、または「Q」は、無線周波数(RF)を使用する電子システムでインダクタと共振器がどれだけうまく機能するかをチェックするときに重要です。「Q」は、回路がエネルギーの損失を最小限に抑え、システムが主要な周波数を中心に処理できる周波数の範囲にどの程度適切に影響するかを測定します。インダクタ、コンデンサ、および調整された回路を備えたシステムでは、より高い「Q」は、回路が特定の周波数に焦点...01/1/1970で公開されています 62925
-

パージバルブガイド:機能、症状、テスト、および最適なエンジン性能の交換
パージバルブは、大気に逃げる前に燃料蒸気を管理することで空気を清潔に保つのに役立つ車のシステムの重要な部分です。これは、汚染を減らすことで環境を支援するだけでなく、車の走行を改善し、燃料をより効率的に使用するようにします。この記事では、パージバルブの作業方法、タイプ、適切に機能しているかどうかを確認する方法など、パージバルブの詳細について説明します。 <h2 style=...01/1/1970で公開されています 62798
-

最大電力伝達定理でピーク性能を達成します
最大電力伝達定理は、バッテリーや発電機などのソースからのエネルギーが接続荷重にどのように流れるかを説明します。これは、負荷が最もパワーを受ける正確な条件を示しています。この記事では、定理の意味、DC回路とAC回路の両方でどのように機能するか、その背後にある証拠、その実生活のアプリケーション、およびその利点と短所について説明します。最後に、この原則がソーラーパネル、ラジオ、スピーカー、さらには...01/1/1970で公開されています 54020
-

A23バッテリー仕様と互換性
A23バッテリーは、高電圧の小さなシリンダー型のバッテリーです。23A、23AE、またはMN21とも呼ばれ、12ボルトで走行し、AAまたはAAAバッテリーよりもはるかに高くなっています。その特別なデザインにより、小さいながらも強力な電源が必要なガジェットに最適です。この記事では、A23バッテリーの機能、パフォーマンス、および使用について説明します。さまざまなブランドやその他...01/1/1970で公開されています 51948
ホットパーツ番号
-

GRM0225C1E4R2BDAEL
Murata Electronics
CAP CER 4.2PF 25V C0G/NP0 01005
5499786-9
TE Connectivity AMP Connectors
CONN HEADER R/A 40POS 2.54MM
LP38855T-1.2
Texas Instruments
IC REG LINEAR 1.2V 1.5A TO220-5
IR3087MTRPBF
Infineon Technologies
IC CONTROLLER PHASE 20MLPQ
MAX981CUA+
Analog Devices Inc./Maxim Integrated
IC COMPARATOR 1 W/VOLT REF 8UMAX
UMK105CG0R5CW-F
Taiyo Yuden
CAP CER 0.5PF 50V C0G/NP0 0402
08051A1R5CAT2A
AVX Corporation
CAP CER 1.5PF 100V C0G/NP0 0805
GCM1555C1H8R5DA16D
Murata Electronics
CAP CER 8.5PF 50V C0G/NP0 0402
GRM0225C1E9R1CA03L
Murata Electronics
CAP CER 9.1PF 25V C0G/NP0 01005
GRM155R71C273KA01D
Murata Electronics
CAP CER 0.027UF 16V X7R 0402
FMS6419MSA28
onsemi
IC VIDEO DRIVER 28SSOP
IHLP2525CZER6R8MA1
Vishay Dale
IHLP-2525CZ-A1 6.8 20% ER E3
SMP1322-005LF
Skyworks Solutions Inc.
RF DIODE PIN 50V 250MW SOT23-3
LM2673T-ADJ
Texas Instruments
IC REG BUCK ADJ 3A TO220-7
AH9247NTR-G1
Diodes Incorporated
MAGNETIC SWITCH OMNIPOL SOT23-3
TPS793285DBVTG4
Texas Instruments
IC REG LIN 2.85V 200MA SOT23-5
TLE5009E1000
Infineon Technologies
MAGNETIC SWITCH ANGLE SENSOR
MEE95-06DA
IXYS
DIODE MODULE 600V 95A TO240AA -

VI-J63-EX
Vicor Corporation
DC DC CONVERTER 24V 75W
CMD11-21VYC/TR8
Visual Communications Company - VCC
LED YELLOW CLEAR 1206 SMD
VI-20L-EX
Vicor Corporation
DC DC CONVERTER 28V 75W
170M5709
Eaton - Bussmann Electrical Division
FUSE SQUARE 450A 70VAC RECT
LGU2C152MELC
Nichicon
CAP ALUM 1500UF 20% 160V SNAP
TPS7B6933DBVR
Texas Instruments
IC REG LINEAR 3.3V 150MA SOT23-5
MM3Z15VB
Fairchild Semiconductor
ZENER DIODE, 15V, 2%, 0.2W, UNID
A1337LLETR-T
Allegro MicroSystems
HIGH RESOLUTION PROGRAMMABLE ANG
NC7SP34L6X
onsemi
IC BUF NON-INVERT 3.6V 6MICROPAK
FMBA56
onsemi
TRANS PNP 80V 0.5A SUPERSOT-6
MUN5216T1G
onsemi
TRANS PREBIAS NPN 50V SC70-3
T491D106K050AT
KEMET
CAP TANT 10UF 10% 50V 2917
MC14LC5480DW
NXP USA Inc.
IC CODEC-FILTER PCM 5V 20-SOIC W
KA5L0365RYDTU
Fairchild Semiconductor
IC OFFLINE SW MULT TOP TO220F
NCV4275ADT50RKG
onsemi
IC REG LINEAR 5V 450MA DPAK-5
IRFR310TRL
Vishay Siliconix
MOSFET N-CH 400V 1.7A DPAK
GRM1555C2A3R7CA01D
Murata Electronics
CAP CER 3.7PF 100V C0G/NP0 0402
COP8SAA720N8
Texas Instruments
IC MCU 8BIT 1KB OTP 20DIP -

VSSAF515-M3/H
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 150V 5A DO221AC
LQP03HQ1N0B02D
Murata Electronics
FIXED IND 1NH 1.1A 40 MOHM SMD
VSC7421XJQ-02
Microchip Technology
IC TELECOM INTERFACE 302TQFP
IRLML6302GTRPBF
Infineon Technologies
MOSFET P-CH 20V 0.78A SOT-23-3
C3216CH2J102K085AA
TDK Corporation
CAP CER 1000PF 630V CH 1206
MCP651T-E/SN
Microchip Technology
IC OPAMP GP 1 CIRCUIT 8SOIC
MURB1620CTRT4G
onsemi
DIODE ARRAY GP 200V 8A D2PAK
AOZ1022DI-5L
Alpha & Omega Semiconductor Inc.
IC REG BUCK ADJ 3A 8DFN
TMK212BJ225MG-T
Taiyo Yuden
CAP CER 2.2UF 25V X5R 0805
ZJY51R5-2PB-01
TDK Corporation
CMC 2A 2LN 300 OHM TH
NCV8614BMNR2G
onsemi
IC REG LDO 5V/3.3V/ADJ 20QFN
LMK107F105ZA-L
Taiyo Yuden
CAP CER 1UF 10V Y5V 0603
VII130-06P1
IXYS
IGBT MOD 600V 121A 379W ECO-PAC2
ADG201HSKNZ
Analog Devices Inc.
IC SWITCH SPST-NCX4 50OHM 16DIP
TS954IPT
STMicroelectronics
IC OPAMP GP 4 CIRCUIT 14TSSOP
TRF37C73IDSGR
Texas Instruments
IC RF AMP 1MHZ-6GHZ 8WSON
SN74ALS74AN
Texas Instruments
IC FF D-TYPE DUAL 1BIT 14DIP
74AC11008PWR
Texas Instruments
IC GATE AND 4CH 2-INP 16TSSOP