
開ループ システムと閉ループ システム: 主な違い、動作、利点、および用途
開ループ システムと閉ループ システムは、入力を与えたときにシステムがどのように応答するかを説明します。この記事では、各システムが何を行うのか、どのように機能するのか、そして結果を制御する上でフィードバックがなぜ重要なのかを学びます。また、それらのコンポーネントとアプリケーションがどのように異なるのかもわかります。これにより、各システムがどこで一般的に使用されているかを理解しやすくなります。カタログ
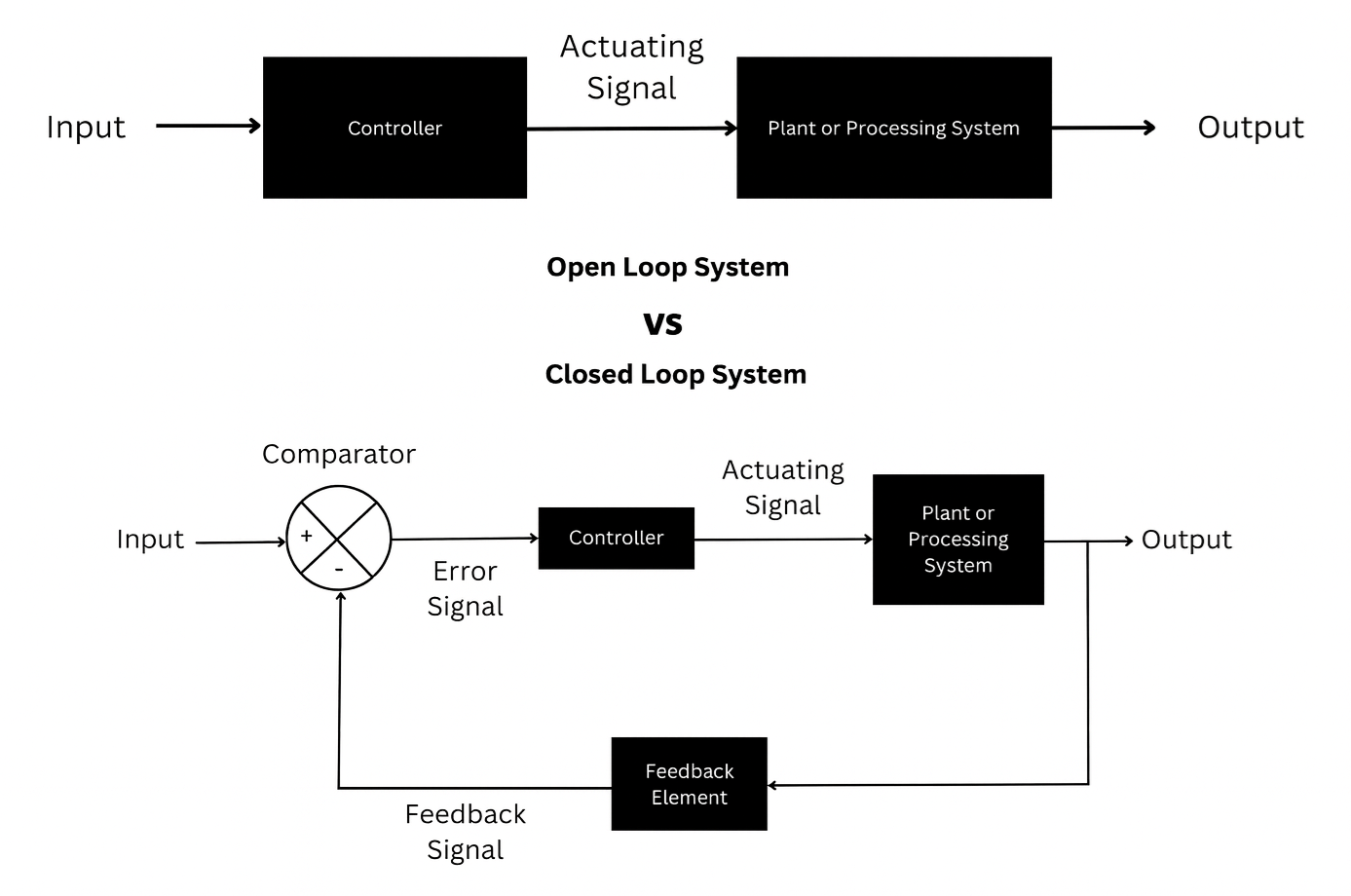
図 1. 開ループ システムと閉ループ システム
オープンループシステムとは何ですか?
開ループ システムは、出力が監視されず、入力と比較されないタイプの制御システムです。制御アクションは、システムによって生成される実際の結果を考慮せず、指定された入力にのみ基づいて適用されます。フィードバック メカニズムがないため、システムは独自にエラーを検出または修正できません。変動や外乱は調整せずに出力に直接影響します。システムの動作は、事前定義された設定またはキャリブレーションに完全に依存します。開ループ制御システムは通常、その単純さと自動エラー修正の欠如によって定義されます。
クローズドループシステムとは何ですか?
閉ループ システムは、フィードバックを使用して実際の出力と必要な入力を継続的に比較する制御システムです。入力と出力の差はエラー信号と呼ばれ、制御動作を決定します。このフィードバックベースの比較により、システムは逸脱に自動的に対応できます。コントローラーは出力を調整して誤差を軽減または排除します。その結果、システムは望ましいパフォーマンスとのより密接な連携を維持します。閉ループ システムは、フィードバックを通じて自己調整する能力によって定義されます。
開ループ システムと閉ループ システムのコンポーネント
|
コンポーネント |
オープンループ
システム |
閉店
ループシステム |
|
入力 /
基準信号 |
入力を使用します
動作を開始しますが、出力との比較は行われません。 |
入力を使用します
実際の出力と継続的に比較されます。 |
|
コントローラー |
固定メッセージを送信します
入力のみに基づいて動作を制御します。 |
調整します
フィードバックに基づいてアクションを継続的に制御します。 |
|
アクチュエータ /
制御要素 |
動作します
コントローラーのコマンドに従って検証なしで実行されます。 |
を変更します
システムからのフィードバックに基づいたアクション。 |
|
出力 /
プロセス |
出力は
生成されたが、測定または修正されていない。 |
出力は
監視され、目的の値に一致するように修正されます。 |
|
センサー /
測定装置 |
センサーはありません
出力を測定するために使用されます。 |
センサー
出力を測定し、データをコントローラーに送信します。 |
|
フィードバック
パス/コンパレータ |
フィードバックはありません
パスまたはエラーの比較。 |
フィードバックパス
とコンパレータはエラー検出に不可欠です。 |
開ループシステムと閉ループシステムはどのように機能するのでしょうか?
オープンループシステム

図 2. オープンループシステムのブロック図
開ループ システムは、結果の出力をチェックせずに入力信号を処理することによって機能します。図に示すように、入力はコントローラーに直接適用され、作動信号が生成されます。この作動信号はプラントまたは処理システムに送信され、出力が生成されます。出力は前方にのみ移動し、いかなる形式でもコントローラーに返されません。フィードバック パスがないため、コントローラーは実際の出力に関する情報を持ちません。意図した結果と一致するかどうかに関係なく、出力が生成されると、システムはその動作を完了します。
クローズドループシステム
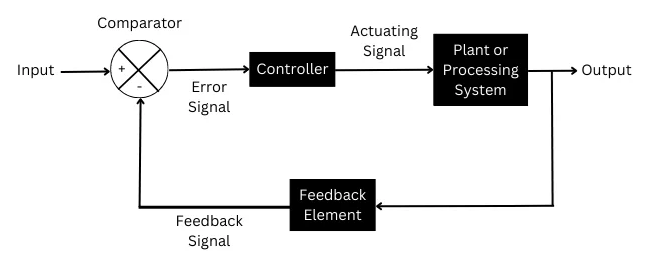
図 3. 閉ループ システムのブロック図
閉ループ システムは、出力と入力を継続的に比較してシステムの応答を制御することによって機能します。図では、入力はまずコンパレータに送信され、そこで出力からのフィードバック信号と比較されます。このコンパレータは、目的の入力と実際の出力の差を表すエラー信号を生成します。次に、エラー信号がコントローラに送信され、コントローラが適切な作動信号を生成します。この作動信号は、プラントまたは処理システムを駆動して出力を生成します。出力はフィードバック要素を介してコンパレータにフィードバックされ、継続的な調整を可能にする完全なループを形成します。
開ループ システムと閉ループ システムのアプリケーション
|
アプリケーション
エリア |
オープンループ
システム |
閉店
ループシステム |
|
家庭用
家電製品 |
洗濯
マシン(タイマーベース):出力を確認せずに一定時間動作します。 |
サーモスタット
エアコンや冷蔵庫: フィードバックを使用して温度を調整します。 |
|
暖房と
料理 |
電子レンジ
オーブン (時間制御): 加熱は事前に設定された時間のみに依存します。 |
温度管理済み
オーブン: センサーを使用して熱を制御します。 |
|
交通と
交通機関 |
定時制
信号機: あらかじめ設定されたタイミングに基づいて信号を変更します。 |
クルーズ
制御システム: フィードバックを使用して車両速度を維持します。 |
|
産業用
機械 |
コンベア
ベルト: 負荷監視なしで一定速度で動作します。 |
産業用
モーター速度制御: 負荷が変化しても速度を維持します。 |
|
パワーと
電気システム |
基本的なバッテリー
充電器: 固定電圧または電流を供給します。 |
自動
電圧レギュレータ (AVR): 安定した出力電圧を維持します。 |
|
自動化
と制御 |
タイマーベース
灌漑システム: 事前に設定された期間作動します。 |
PLCベース
プロセス制御システム: センサーのフィードバックを使用して動作を調整します。 |
|
ロボット工学と
モーションコントロール |
シンプル
反復マシン: 固定された動作を実行します。 |
サーボモーター
およびロボットアーム: 位置と速度を正確に制御します。 |
|
流体と
レベルコントロール |
手動給水
ポンプ: レベル検知なしで動作します。 |
自動
水位コントローラー: フィードバックに基づいてポンプを開始および停止します。 |
オープンループシステムとクローズドループシステムの利点
オープンループシステムの利点
• シンプルなデザインでわかりやすい
• 部品点数が少ないため低コスト
• 速い応答時間
• 建設とメンテナンスが簡単
• センサーやフィードバック要素は不要
• フィードバックによる発振のない安定した動作
• 固定された予測可能な動作条件に最適
クローズドループシステムの利点
• 継続的なフィードバックによる高精度
• 自動エラー検出と修正
• 外乱の影響を受けにくい
• さまざまな負荷条件下でのパフォーマンスの向上
• 信頼性と一貫性の向上
• 不安定なプロセスを安定化する機能
• 複雑で精度を重視したアプリケーションに最適
オープンループシステムとクローズドループシステムの欠点
オープンループシステムの欠点
• フィードバックがないため、エラーを修正できません。
• 閉ループシステムより精度が低い
• 外乱やパラメータの変化に非常に敏感
• 出力は完全にキャリブレーションに依存します
• 変化する状況への適応力が低い
• 複雑な制御や精密な制御には適していません。
クローズドループシステムの欠点
• より複雑な設計と実装
• センサーとフィードバックコンポーネントによるコストの増加
• 定期的なメンテナンスと校正が必要
• フィードバック処理により応答が遅くなる
• 設計が不適切な場合、不安定または発振のリスク
• フィードバック要素の故障はシステムのパフォーマンスに影響を与える可能性があります
オープンループシステムとクローズドループシステムの比較
|
パラメータ |
オープンループ
システム |
閉店
ループシステム |
|
フィードバック
存在感 |
フィードバックはありません
パスが使用されます。 |
フィードバックパス
システムの重要な部分です。 |
|
制御
アクション |
制御動作
入力信号のみに依存します。 |
制御
アクションは入力と出力の間の誤差に応じて異なります。 |
|
エラー
訂正 |
エラーはできません
自動的に検出または修正されます。 |
エラーとは、
継続的に検出および修正されます。 |
|
精度 |
精度が低い
フィードバックがないため。 |
高精度
継続的なフィードバック制御によるものです。 |
|
複雑さ |
シンプルなシステム
構造もデザインも。 |
より複雑な
センサーとフィードバック回路によるものです。 |
|
安定性
|
当然のことながら
一定の条件下では安定します。 |
安定性
適切なフィードバック設計に依存します。 |
|
応答時間 |
より速く
フィードバック処理が含まれていないため、応答が返されます。 |
わずかに
フィードバックと比較プロセスにより遅くなります。 |
|
妨害
取り扱い |
非常に
外乱の影響を受ける。 |
影響は少ない
フィードバックが外乱を補償するためです。 |
|
信頼性 |
信頼性が低い
動作条件が変化したとき。 |
より信頼性の高い
さまざまな条件下で。 |
|
センサー
要件 |
センサーは
必要ありません。 |
センサーは
出力を測定するために必要です。 |
|
メンテナンス |
簡単に
シンプルな構造なのでメンテナンスが容易です。 |
必要なもの
定期的なメンテナンスと校正。 |
|
適応性 |
貧しい
負荷や環境の変化に対する適応力。 |
高
変化や障害に対する適応力。 |
結論
開ループ システムはシンプルで低コストですが、フィードバックを使用しないためエラーを修正できません。閉ループシステムはフィードバックを使用して出力を調整し、より正確で信頼性の高いものになります。コンポーネント、動作、利点、および制限の違いは、フィードバックがシステムの動作にどのように影響するかを浮き彫りにします。これらのシステムのどちらを選択するかは、必要な精度、複雑さ、コスト、および動作条件によって異なります。
関連情報
ALLELCO LIMITED
もっと見る
クイックお問い合わせ
お問い合わせを送ってください、すぐに返信します。
一般的な問題 [FAQ]
1. オープンループシステムは現代のオートメーションでもまだ使用されていますか?
はい、オープン ループ システムは、精度やフィードバックが必要とされないシンプルで低コストのアプリケーションで今でも使用されています。
2. 産業用制御アプリケーションにはどのシステムが適していますか?
閉ループ システムは、外乱、負荷の変化、精度要件に対応できるため、産業用制御に適しています。
3. 閉ループ システムには常にセンサーが必要ですか?
はい、センサーは閉ループシステムにおいて出力を測定し、コントローラーにフィードバックを提供するために不可欠です。
4. 開ループ システムを閉ループ システムに変換できますか?
はい、センサー、フィードバック パス、コンパレーターを追加すると、開ループ システムを閉ループ システムに変換できます。
5. 開ループ システムはなぜ閉ループ システムよりも速いのですか?
オープンループシステムは、フィードバック処理や比較遅延がないため、より速く応答します。

プログラマブル ロジック コントローラー (PLC): 定義、種類、動作原理、およびアプリケーション
12/15/2025で公開されています
アップダウンカウンタの特徴、動作、種類、用途、カウンタの比較を解説
12/13/2025で公開されています
ホットポスト
-

複雑な命令セットコンピューター:コンピューティングをどのように変更しましたか?
06/4/8000で公開されています 148296
-

USB-Cピンアウトと機能
06/4/2000で公開されています 129886
-
Xilinx Unified Simulation Primitivesの使用:FPGAの設計とシミュレーションの包括的なガイド
06/4/1600で公開されています 111778
-

電子機器における電源電圧: VCC、VDD、VEE、VSS、および GND の意味
06/4/0400で公開されています 93317
-

RJ45コネクタガイド:ピンアウト、配線、ケーブルタイプ、および使用
01/1/1970で公開されています 91959
-

現代の電気システムにおけるワイヤカラーコードの究極のガイド
電気システムの使用方法は、色だけではありません。各ワイヤーの色は特定の機能を示し、設置とメンテナンス中に電気コンポーネントを正しく識別して処理しやすくなります。これは、運用プロセスをスピードアップするだけでなく、間違いの可能性を減らし、ユーザーと技術者の両方を安全に保つのに役立ちます。この記事では、ワイヤーカラーコードの重要性、安全性と機能への影響、およびそれらを導くグローバル基準について説...01/1/1970で公開されています 76105
-

品質(Q)係数:方程式とアプリケーション
質の高い要因、または「Q」は、無線周波数(RF)を使用する電子システムでインダクタと共振器がどれだけうまく機能するかをチェックするときに重要です。「Q」は、回路がエネルギーの損失を最小限に抑え、システムが主要な周波数を中心に処理できる周波数の範囲にどの程度適切に影響するかを測定します。インダクタ、コンデンサ、および調整された回路を備えたシステムでは、より高い「Q」は、回路が特定の周波数に焦点...01/1/1970で公開されています 74001
-

パージバルブガイド:機能、症状、テスト、および最適なエンジン性能の交換
パージバルブは、大気に逃げる前に燃料蒸気を管理することで空気を清潔に保つのに役立つ車のシステムの重要な部分です。これは、汚染を減らすことで環境を支援するだけでなく、車の走行を改善し、燃料をより効率的に使用するようにします。この記事では、パージバルブの作業方法、タイプ、適切に機能しているかどうかを確認する方法など、パージバルブの詳細について説明します。 <h2 style=...01/1/1970で公開されています 68008
-
回路図でコンデンサとそのシンボルを理解する
コンデンサは、ほぼすべての電子デバイスで使用される小さな部品です。それらは電気エネルギーを保管および放出し、騒音を減らすのに役立つ電源、無線、回路などに見られます。エレクトロニクスを操作するには、回路図にコンデンサがどのように示されているかを理解することが役立ちます。この記事では、コンデンサが何であるか、それらがどのように機能するか、およびこれらの図で使用されているシンボルをどのように読むか...06/4/2000で公開されています 57885
-

A23バッテリー仕様と互換性
A23バッテリーは、高電圧の小さなシリンダー型のバッテリーです。23A、23AE、またはMN21とも呼ばれ、12ボルトで走行し、AAまたはAAAバッテリーよりもはるかに高くなっています。その特別なデザインにより、小さいながらも強力な電源が必要なガジェットに最適です。この記事では、A23バッテリーの機能、パフォーマンス、および使用について説明します。さまざまなブランドやその他...01/1/1970で公開されています 57463
ホットパーツ番号
-

CC1206KKX7RYBB223
YAGEO
CAP CER 0.022UF 250V X7R 1206
1.5SMC36CA
Littelfuse Inc.
TVS DIODE 30.8VWM 49.9VC DO214AB
SN74AHC595QPWRQ1
Texas Instruments
IC SHIFT REGISTER SGL 8B 16TSSOP
5CEFA5M13C8N
Intel
IC FPGA 175 I/O 383MBGA
SN74LVC2G86YZPR
Texas Instruments
IC GATE XOR 2CH 2-INP 8DSBGA
TL431IDBVR
Texas Instruments
IC VREF SHUNT ADJ 2.2% SOT23-5
FAN48632UC35X
onsemi
IC REG CONV GSM PA 1OUT 16WLCSP
EN6382QI
Intel
DC DC CONVERTER 0.6-5.9V
TC835CPI
Microchip Technology
IC DRVR 7 SEG 4 1/2 DIGIT 28DIP
20CJQ060TR
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 60V SOT223
AOT264L
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 60V 19A/140A TO220
78438335022
Würth Elektronik
FIXED IND 2.2UH 1.8A 108MOHM SMD
TLE4275S
Infineon Technologies
IC REG LIN 5V 450MA TO220-5-12
ADE7752ARZ
Analog Devices Inc.
IC ENERGY METERING DETEC 24-SOIC
5177984-1
TE Connectivity AMP Connectors
CONN PLUG 40POS SMD GOLD
KSZ8852HLEWA
Microchip Technology
IC ETHERNET CTLR 2PORT PCI 64LQF
1N5248B
Microchip Technology
DIODE ZENER
IS42S81600F-6TL
ISSI, Integrated Silicon Solution Inc
IC DRAM 128MBIT PAR 54TSOP II -

LQM2HPN1R0MJCL
Murata Electronics
FIXED IND 1UH 1.5A 108 MOHM SMD
USB3329C-GL-TR
Microchip Technology
IC TRANSCEIVER HALF 1/1 25WLCSP
GP1UM281QKVF
SHARP/Socle Technology
SENSOR REMOTE REC 38.0KHZ 8.5M
TDA7498ETR
STMicroelectronics
IC AMP D MONO/STER 220W PWRSSO36
TPS23754PWP
Texas Instruments
IC POE CNTRL 1 CHANNEL 20HTSSOP
SN74AS138NSR
Texas Instruments
IC DECODER/DEMUX 1 X 3:8 16SO
AT86RF233-ZUR
Microchip Technology
IC RF TXRX+MCU 802.15.4 32VFQFN
SN74LVC2G32DCURE4
Texas Instruments
IC GATE OR 2CH 2-INP 8VSSOP
MAX4657ESA
Analog Devices Inc./Maxim Integrated
IC SWITCH SPST-NCX1 10OHM 8SOIC
GRM0336T1E9R0DD01D
Murata Electronics
CAP CER 9PF 25V T2H 0201
HFBR-4597Z
Broadcom Limited
TOOL HAND CRIMPER FBR OPTIC SIDE
LMK316BJ335MD-T
Taiyo Yuden
CAP CER 3.3UF 10V X5R 1206
APT8014JLL
Microchip Technology
MOSFET N-CH 800V 42A ISOTOP
06033C152JAT2A
KYOCERA AVX
CAP CER 1500PF 25V X7R 0603
AC0603KRX7R8BB105
YAGEO
CAP CER 1UF 25V X7R 0603
ZTX749A
Fairchild Semiconductor
TRANS PNP 35V 2A TO226
12101C105M4T4A
AVX Corporation
CAP CER 1UF 100V X7R 1210
MR25H40CDC
Everspin Technologies Inc.
IC RAM 4MBIT SPI 40MHZ 8DFN -

C1608JB0J156M080AC
TDK Corporation
CAP CER 15UF 6.3V JB 0603
MAX499CWG
Analog Devices Inc./Maxim Integrated
IC BUFF/AMP RGB SPDT 24-SOIC
MMSZ5254BS-7-F
Diodes Incorporated
DIODE ZENER 27V 200MW SOD323
SN74CBT16244CDGGR
Texas Instruments
IC BUS SWITCH 4 X 1:1 48TSSOP
DAC0832LCN
Texas Instruments
IC DAC 8BIT A-OUT 20DIP
08055U3R0DAT2A
KYOCERA AVX
CAP CER 3PF 50V NP0 0805
TLV62568DRLR
Texas Instruments
IC REG BUCK ADJ 1A SOT563-6
SN74HC257ANSR
Texas Instruments
IC MULTIPLEXER 4 X 2:1 16SO
P4KE30A
Taiwan Semiconductor Corporation
TVS DIODE 25.6VWM 41.4VC DO204AL
LAA127LSTR
IXYS Integrated Circuits Division
SSR RELAY SPST-NO 170MA 0-250V
VE-230-CW
Vicor Corporation
DC DC CONVERTER 5V 100W
EP1S10F484C6N
Intel
IC FPGA 335 I/O 484FBGA
SN74AXC4T245BQBR
Texas Instruments
IC TRANSCEIVER HALF 4/4 16WQFN
SRR1260A-100M
Bourns Inc.
FIXED IND 10UH 5.5A 20 MOHM SMD
1206ZC225KAZ2A
KYOCERA AVX
CAP CER 2.2UF 10V X7R 1206
VI-230-IW
Vicor Corporation
DC DC CONVERTER 5V 100W
CY74FCT573CTSOC
Texas Instruments
IC OCT TRANS D LATCH 3ST 20SOIC
ACPL-790B-300E
Broadcom Limited
IC OPAMP ISOLATION 1 CIRC 8DIPGW